בחיבור בלותות
נלחץ על כפתור העצירה בסביבת scratch
![]()
או על כפתור חזור ברובוט.
בחיבור כבל נלחץ על כפתור חזור בלבד
כדי לפתור בעיה זאת יש לעדכן את תכנת ההפעלה ידנית.
פתח את תכנת ה- EV3 וחבר את הרובוט למחשב בעזרת כבל USB ופעל על פי ההוראות הבאות:
- לחץ בו זמנית על שלושת הכפתורים בבקר: כפתור "חזור" כפתור בחירה (האמצעי) וכפתור ימני.
 2. כאשר הבקר מאתחל, שחרר את כפתור "חזור".
2. כאשר הבקר מאתחל, שחרר את כפתור "חזור".
 3. כאשר על מסך הבקר מופיעה המילה “Updating", שחרר את שני הכפתורים האחרים. עתה יש ללחוץ במסך המחשב על המילה "download" כדי להוריד את עדכון התכנה לרובוט. לאחר שהתכנה תרד לרובוט, הרובוט יאתחל את פעולתו.
3. כאשר על מסך הבקר מופיעה המילה “Updating", שחרר את שני הכפתורים האחרים. עתה יש ללחוץ במסך המחשב על המילה "download" כדי להוריד את עדכון התכנה לרובוט. לאחר שהתכנה תרד לרובוט, הרובוט יאתחל את פעולתו.
אם הרובוט לא מתחבר לסביבת העבודה ב- Scratch לאחר שהפעלתם Scratch link ובדקתם שחיבור בלותות מחובר ברובוט נסו לחבר את הרובוט ישירות לבלותות בממשק windows בטרם תתחברו לסביבה.
- לחצו על חיבור ה- Bluetooth

2. ברשימה הנפתחת בחרו בהצג רשימת חיבורים ל Bluetooth
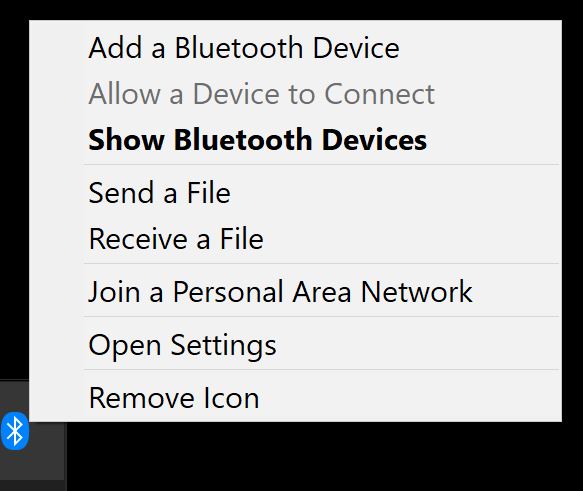
3. אם הרובוט שלכם מופיע ברשימת החיבורים, מיחקו אותו ובחרו בהוסף חיבור חדש.


![]()
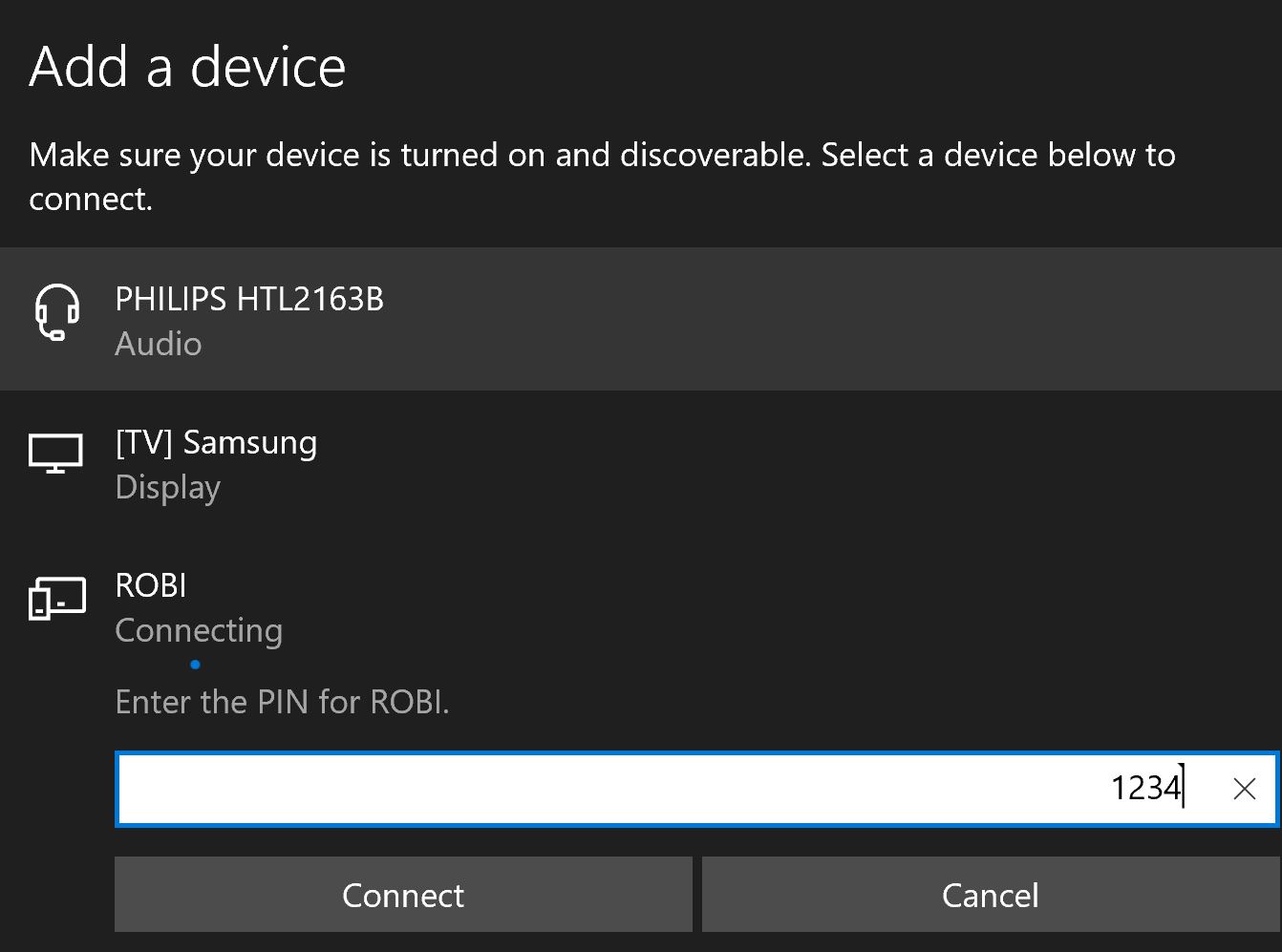
אם אינכם רואים את שם הרובוט ברשימה, סיגרו את חלון הרשימה ולחצו על כפתור הוסף חיבור חדש. אם הכל כשל אתחול הרובוט והמחשב נחוצים.
4. אשרו את קוד החיבור ברובוט ובמחשב כדי להתחבר.
5. חזרו לסביבת scratch , הקפידו ש scratch link פועל, פתחו את ההרחבה וחברו את הרובוט.
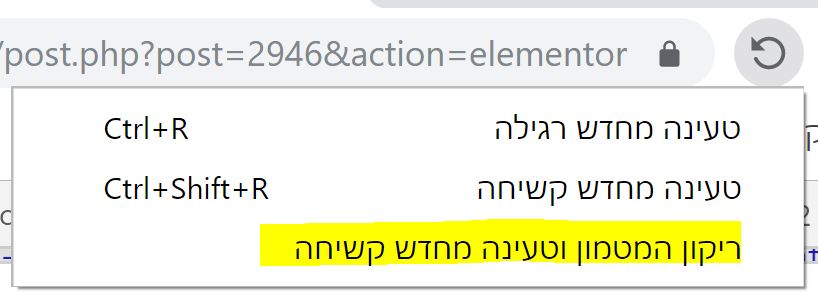
נסו ללחוץ F12 במקלדת. לאחר מכן לחצו לחצן ימני בעכבר על כפתור רענון ובחרו באפשרות:
Empty Cache and Hard Reload
או בעברית:
ריקון המטמון וטעינה מחדש קשיחה