נחלק לילדים את הקופסאות כך שיוכלו להוציא מתוכן את חיישן המגע ואת החלקים המתאימים להתקנה.
נבקש מהילדים להתקין את החיישן על הרובוט. נפנה את הילדים לחוברת הבניה עמודים 77-79 או לקישור הוראות הרכבה חיישן המגע באתר.
הערכת זמן להרכבת החיישן לכל הקבוצות היא כ-15 דקות.
לאחר שהילדים יסיימו להרכיב את חיישן המגע על הרובוט, כולל הכבל שיוצא מהחיישן אל יציאה מספר 1 בבקר, נסביר להם על סוג המידע שמעביר חיישן המגע.
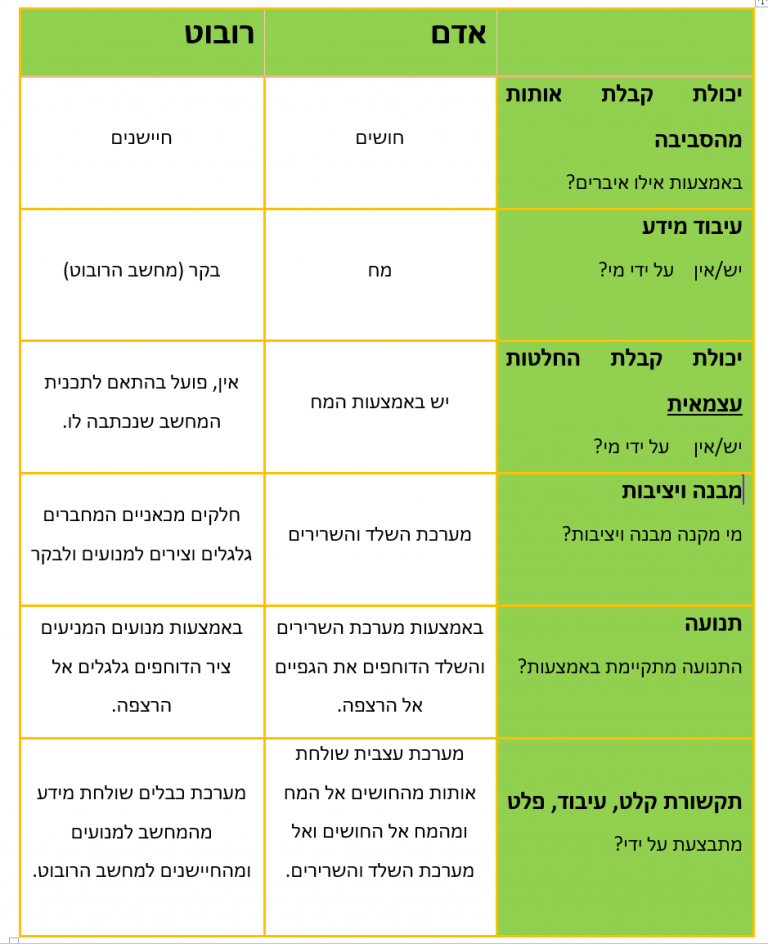
חיישן המגע, מאפשר לנו לזהות מגע עם חפצים בסביבה. החיישן מכיל לחצן אדום בצורת צלב והוא כולל חריץ להכנסת ציר מוצלב.
החיישן הוא דיגיטאלי. לחיצה על המתג האדום בחיישן המגע, סוגר מעגל, המעביר אות חשמלי המציין מגע.
החיישן מעביר לנו שני סוגי מידע :
1- משמעותו הלחצן במצב לחוץ
0- משמעותו הלחצן במצב משוחרר
כדי לראות את הפלט 0 או 1 יש לדפדף בבקר הרובוט בעזרת החיצים, בחירה תעשה בעזרת כפתור הבחירה (הכפתור האמצעי).
בחר ב Tools ——–> Test sensors———> בחרו בPort 1 (יש לוודא שאכן זאת היציאה אליה חובר החיישן בבקר הרובוט) ———–<בחרו בחיישן Ev3 Touch (יש לגלול אם החץ מטה)——->
לחיצה על Touch.
תמונת מסך לדוגמה. (בחלונית שנפתחת בחרו ב NO)
לחצו על החיישן והציגו בפני הילדים את השינוי מ-0 ל-1 בעת שהם לוחצים על חיישן המגע.
במפגש הבא נתחיל ללמוד על הדרכים לתכנות הרובוט עם חיישן המגע.