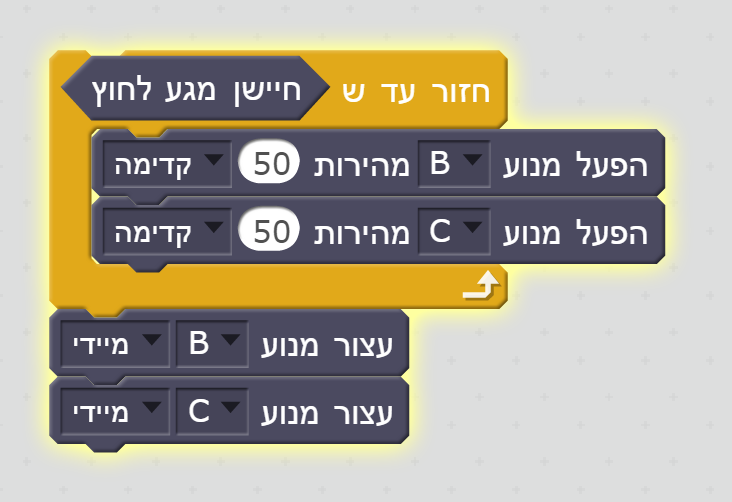
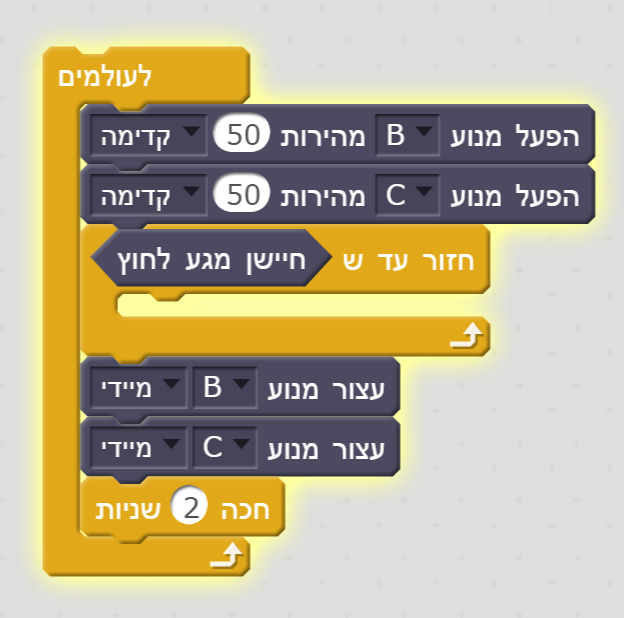
אם אנחנו רוצים שהתנאי ייבדק כל הזמן נבנה את תכנית ב'.
שימו לב, בתכנית ב', הוצאנו את הפעלת המנוע אל מחוץ ללולאה והתנאי חזור עד ש… משמש כתנאי ליציאה ממנה ואז עם השהייה לאחר עצירת המנועים, הכל מתחיל מחדש.
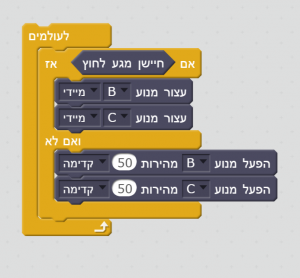
לולאות תנאי אם.. אז.. ואם אז… ואם לא…
מ ש פ ט ' א ם '
משפט 'אם' הוא מבנה בקרה על זרימת ביצוע תסריט. כשהמחשב מבצע קבוצת פקודות בכל שפת תכנות הוא מבצע את הפקודות באופן סדרתי, כלומר פקודה אחר פקודה. אולם לעיתים צריך לבדוק האם התרחש מצב מסוים ולפעול בהתאם לתוצאת הבדיקה. משפט 'אם' מאפשר, בשילוב ביטוי לוגי, לבצע קבוצת פקודת מסוימות רק אם התנאי שנבדק הוא 'אמת'.
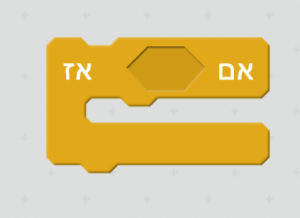
מ ש פ ט אם… אז…
מבנה בקרת זרימת ביצוע תכנית של משפט זה מאפשר כתיבת קבוצת פקודות. אם התנאי אכן התקיים, כלומר "אמת" יתבצעו הפקודות בתוך הלולאה ואם לא "שקר" התכנית תמשיך בביצוע הרגיל שלה לפני התנאי.