מידע על התמסורות לקראת תכנות זרוע-
בקשו מהילדים להתבונן בזרוע, בצירים, בגלגל השיניים המיוחד המכיל 4 שיניים בלבד.
הסבירו להם שאל המנוע מחובר ציר קטן אדום, אליו חיברנו את גלגל השיניים (4 שיניים).
גלגל השיניים, המחובר למנוע, נקרא גלגל מניע. לגלגל השיניים המניע, חיברנו גלגל, בגודל זהה אך אנך לו. גלגל שיניים זה נקרה גלגל נגרר, תנועתו נובעת מהיגררות אחרי תנועת הגלגל הראשון המחובר למנוע מעצם שילוב השיניים של שניהם אלה באלה. הגלגל הנגרר, בחיבור הזרוע חוברת אנכית עקב תפקידו החשוב בשינוי תנועת המנוע מתנועה אופקית לאנכית. השינוי הזה מאפשר לזרוע לנוע מעלה ומטה בכל פעם שאנו מניעים את המנוע.
היחס בגודל גלגלי השיניים הוא אחד לאחד , לשניהם יש ארבע שיניים בגודל זהה. שניהם עושים דרך זהה בזמן זהה לסיבוב 360 מעלות. (הם בגודל זהה ולכן נעים במהירות זהה).
אם היינו משנים את גלגל השיניים הנגרר לגלגל קטן יותר, היה לו פחות דרך לעשות כדי להשלים סיבוב של 360 מעלות ולכן הוא ינוע מהר יותר יחסית לגלגל המניע. כתוצאה מכך הזרוע המחוברת היתה נעה מהר יותר. הכוח שלה היה פוחת (זה נקרא העלאת הילוך) המהירות היא על חשבון הכח.
אם היינו משנים את גלגל השיניים הנגרר לגלגל גדול יותר, היתה לו יותר דרך לעשות כדי להשלים סיבוב של 360 מעלות ולכן הוא ינוע לאט יותר יחסית לגלגל המניע. כתוצאה מכך, הזרוע המחוברת היתה נעה לאט יותר. הכח שלה היה גדול יותר במקרה זה. (זה נקרא הורדת הילוך).
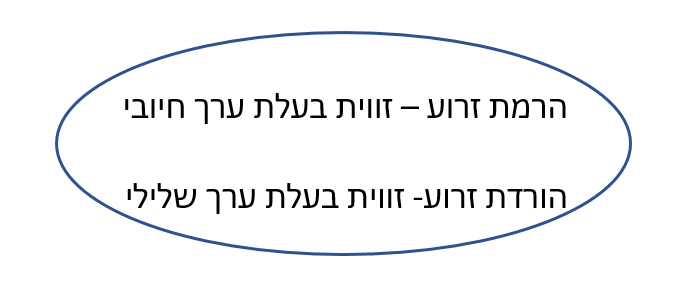
נפנה את תשומת לבכם לנקודה נוספת. כשחיברנו ציר לגלגל היינו צריכים לחשב את היקף הגלגל כדי לדעת מה המרחק שהגלגל יעבור בסיבוב של 360. להיקף הגלגל יש השפעה על מרחק הנסיעה. בחיבור זרוע החיבור כמעט ישיר בעזרת הציר אל המנוע. זה מאפשר לנו להשתמש בחיישן מעלות המנוע. בזרוע נכון לתכנת עם מעלות. סיבוב של 90 מעלות יגרום להרמת הזרוע ברבע סיבוב כמעט מדויק.