פירוש השם אולטראסוניק הוא:
סוניק = קולי
אולטרא = מעל
סוניק- מעל היכולת שלנו לשמוע את הקול הזה.
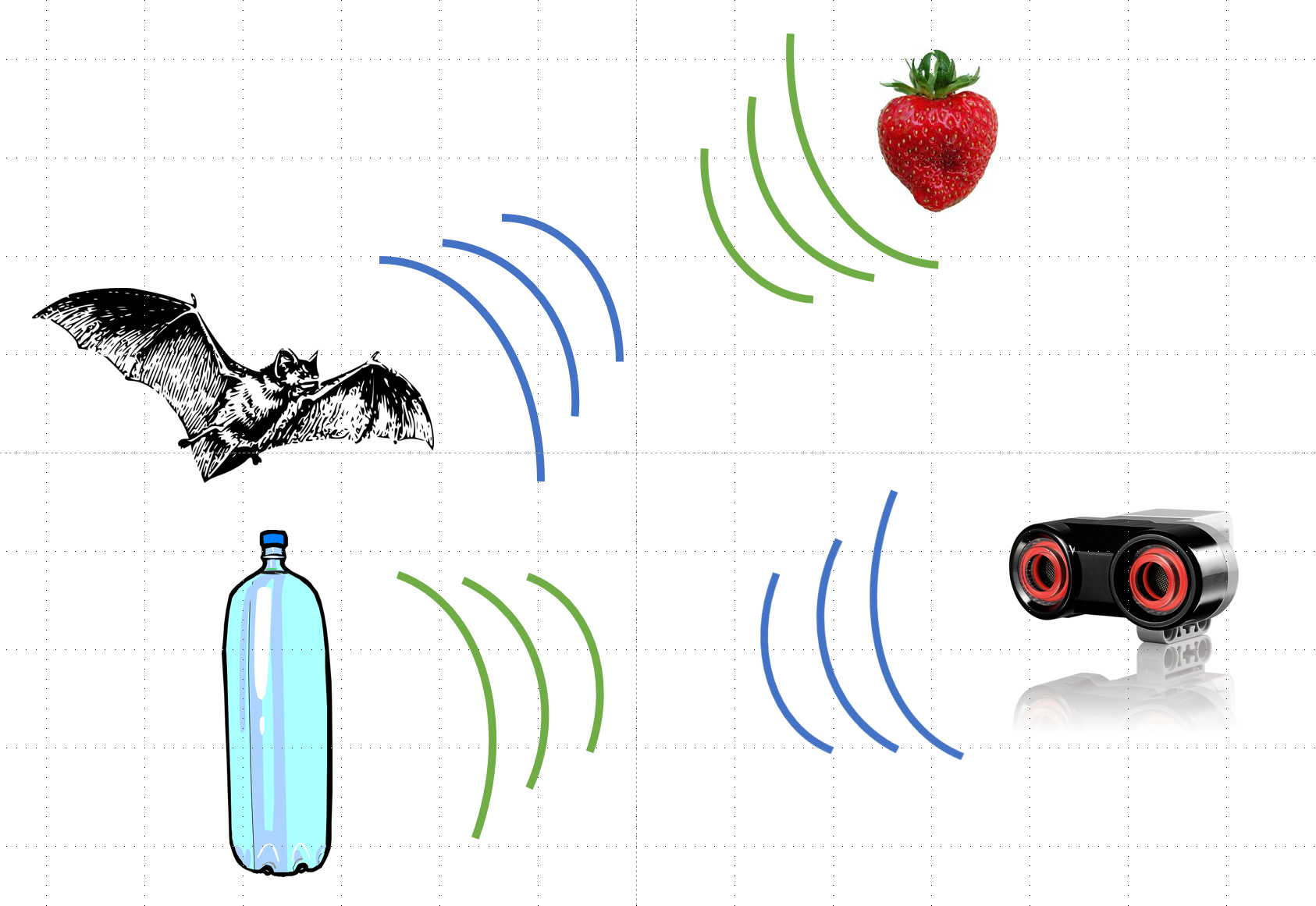
לחיישן יש צורה המזכירה שתי עיניים, שתי עיניים אלה הם בעצם שני חלקים שכל אחד מהם תפקיד חשוב בקלט החיישן:
- "עין אחת" משמשת כמשדר השולח אות קולי, שבני האדם לא יכולים לשמוע, לעבר העצם.
- "עין שניה" המשמשת כמקלט (מעין מיקרופון) המקבל חזרה את גלי הקול החוזרים מהעצם.
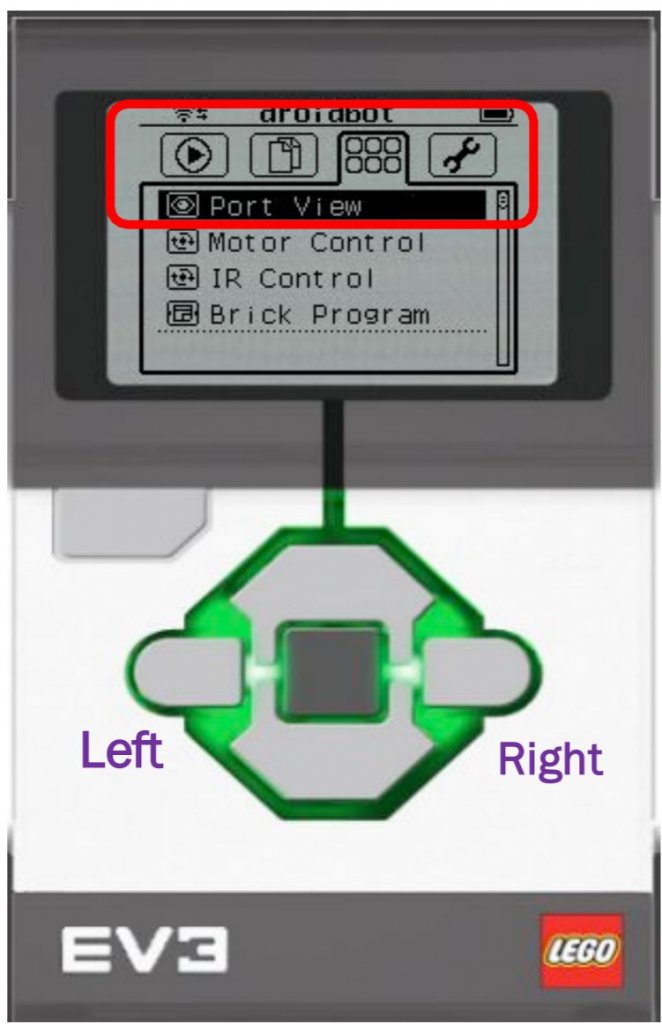
החיישן מחשב את הזמן שלוקח לאות הקולי לחזור. אם האות נקלט במקלט מהר, החיישן יודע שהעצם קרוב. אם זמן החזרת האות מתארך, החיישן יודע לתרגם זאת למרחק גדול יותר של עצם. אותות קוליים מעצם קרוב ,יחזרו למקלט מהר יותר מאותות קוליים מעצם מרוחק. מעל מרחק מסוים החיישן לא יכול לזהות עצמים. החיישן, יכול למדוד מרחקים בסנטימטר או באינצ'ים (ניתן לבחור את יחידת המדידה על ידי לחיצה על הכפתור האמצעי). בתוכנה שלנו הוהוא יכול למדוד מרחק בין 0 ל- 2.55 מטרים (255 ס"מ) ברמת דיוק של 3 ס"מ.
לאחר שהחיישן ביצע את פעולת הקלט לשמה הורכב על הרובוט אנו עוברים לשלב עיבוד המידע:
החיישן קיבל אותו קולי חזרה מהעצם והמיר אותו ליחידת זמן. יחידת הזמן מועברת לבקר הרובוט על ידי אנרגיה חשמלית, שפה שבקר הרובוט מבין ( 0 ו-1 ). הזמן מתורגם בבקר הרובוט ליחידות מרחק הנותנות לנו מידע על מרחק העצם מהרובוט.
כדי שהרובוט יוכל לנוע בסביבה (בחוג סגור) תוך כדי תגובה לקלט החיישן, עלינו ליצור תכנית מחשב המשתמשת בחיישן ואומרת מה יקרה במצבים שונים של מדידות החיישן.
החיישן הוא אמצעי קלט הקולט מידע מהסביבה.
הבקר מעבד את המידע, בהתאם לתכנית המחשב שכתבנו.
הרובוט יבצע פלט מותאם, באמצעות מנועים, קולות או אורות, בהתאם למדידת המרחק ותכנית המחשב שכתבתנו.
כל המידע מהחיישן לבקר מועבר באמצעות הכבל שנחבר לכניסה 4 ברובוט.