נושאים:
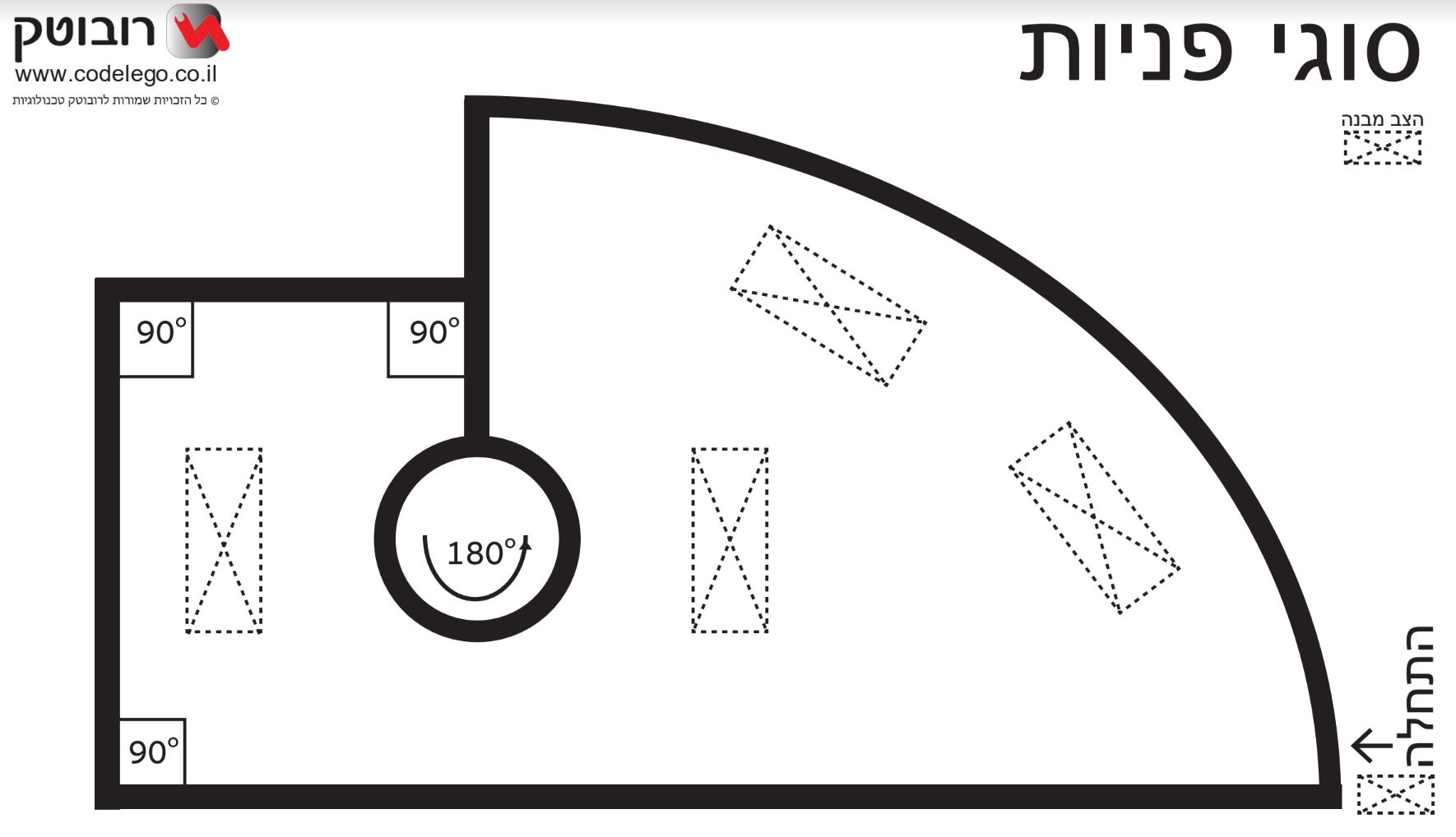
סוגי פניות
הקדמה למורה:
סוגי פניות
הקדמה:
בפרק הקודם למדנו להסיע את הרובוט קדימה ולאחור בעזרת שני מנועים הנעים במהירות זהה.
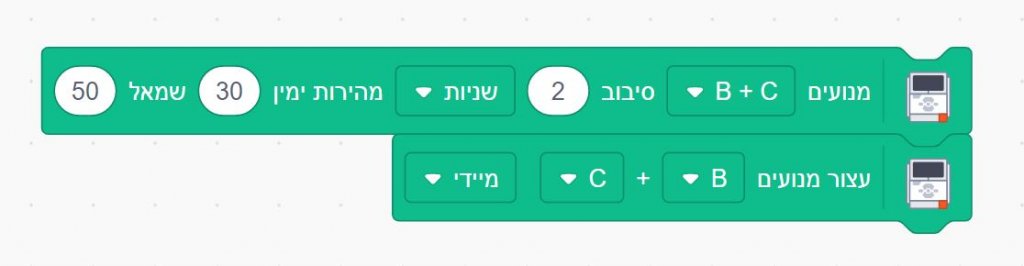
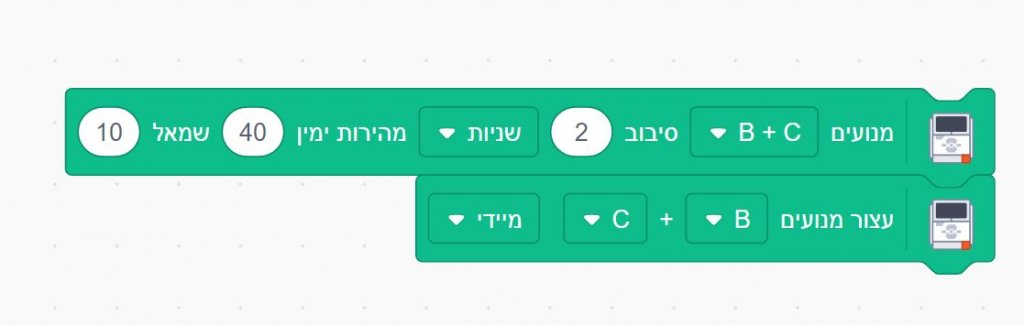
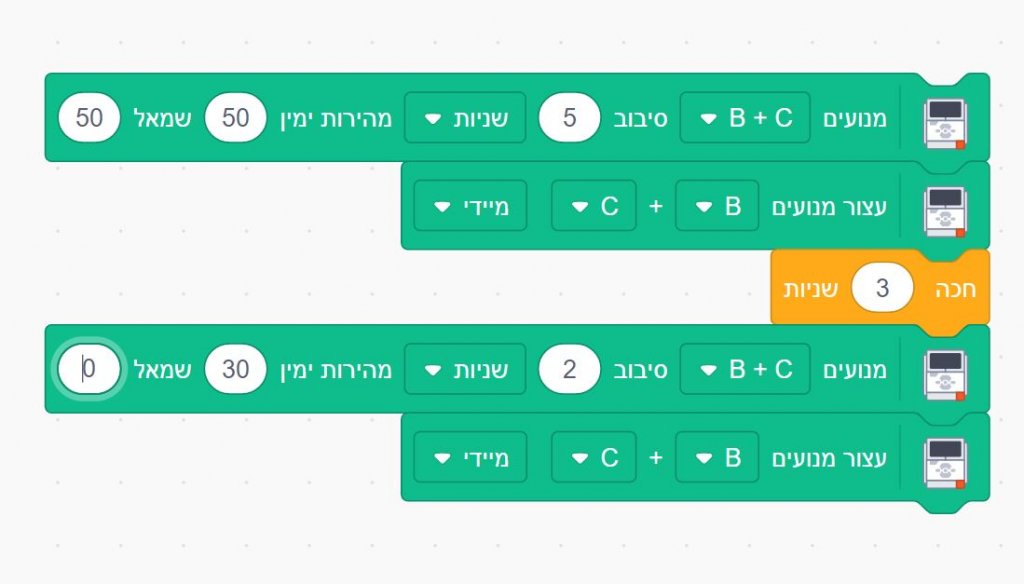
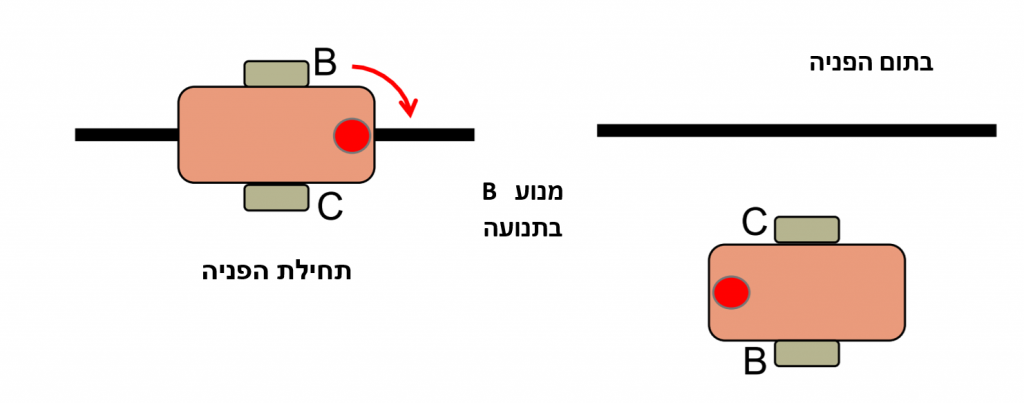
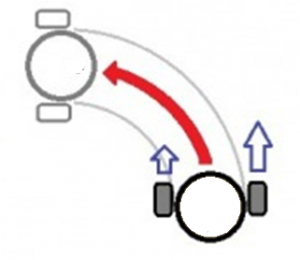
למדנו כיצד לגרום לרובוט להסתובב ימינה או שמאלה בעזרת הפעלת אחד המנועים במהירות מסויימת וקביעת מהירות המנוע השני ל "0" . למדנו שהכיוון אליו הרובוט יסתובב יהיה תמיד בכיוון המנוע שמהירותו נקבעה ל "0".
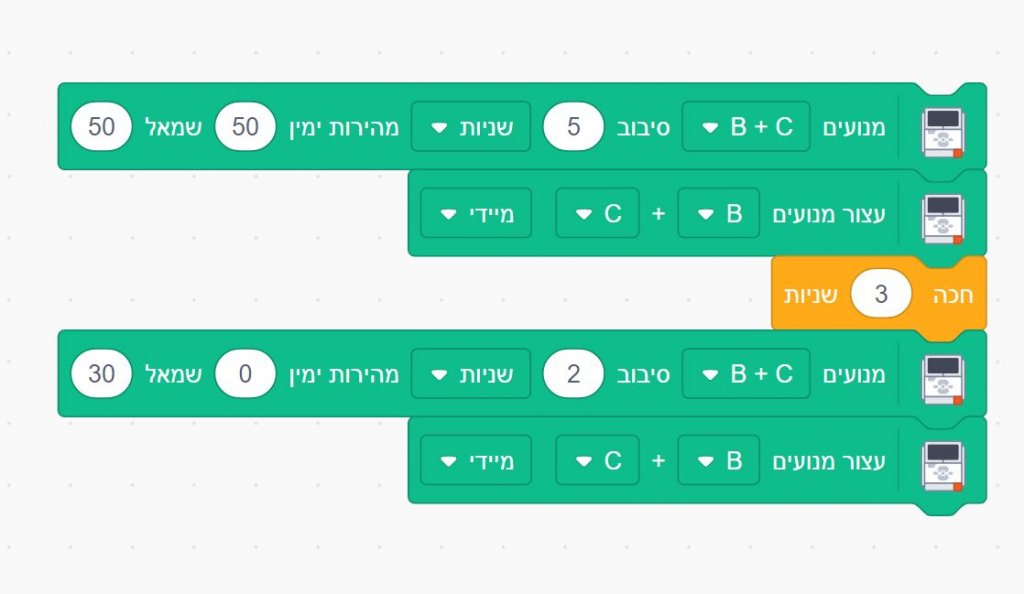
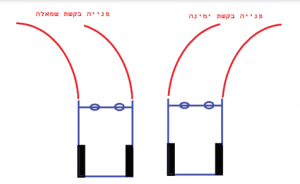
בשיעור זה נלמד להבחין בסוגים שונים של פניות שישמשו אותנו לביצוע פניות בהתאם למרחב בסביבה. לשיעור זה יש דף עבודה לתלמיד המלווה את השיעור.
אנו ממליצים להיעזר להקניית הנושא בשטיח "סוגי פניות" אותו ניתן להשיג בפניה לשירות הלקוחות בחברת רובוטק או לקבלו להדפסה בפניה אישית לאחר הרשמה לתפוצת האתר.