לאחר שדנו עם הילדים ועיבדנו את הכתיבה הנכונה של התכנית וביצענו לשביעות רצוננו, נדון עתה על הדרך בה נוכל לסובב את המנוע. הילדים צריכים להגיע להבנה שעל מנת לסובב את הרובוט הם יכולים להניע רק מנוע אחד. בהמשך ילמדו שהם יכולים להפעיל שני מנועים במהירויות שונות כדי לקבל סוגים שונים של פניות עליהם נרחיב בפרק הבא.
נרשום על הלוח את האלגוריתם הבא:
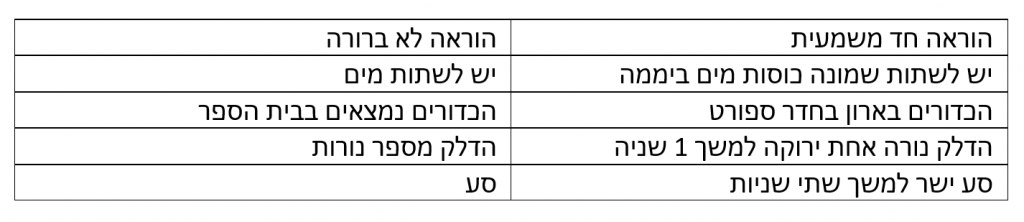
אלגוריתם לנסיעה קדימה למשך 2 שניות ופניה ימינה למשך שניה:
- סע קדימה למשך שתי שניות
- פנה ימינה למשך שניה
- עצור
נבקש מהילדים לתכנת את הרובוט לבצע אלגוריתם זה. אנו רוצים שהילדים יבינו שהם צריכים לסובב רק מנוע אחד כדי ליצור פניה ברובוט. המורה ישאל את התלמידים אם למישהו יש רעיון כיצד ניתן לגרום לרובוט להסתובב. נאסוף את תשובות הילדים ולאחר מכן נדגים להם פיסית בעזרת הרובוט. ניקח את הרובוט, נאחז את הגלגל השמאלי (המחובר למנוע B) ונסיע אותו בעזרת הגלגל השני. הילדים יראו שהרובוט מסתובב לכיוון שמאל, כיוון הגלגל אותו אנו אוחזים ומונעים ממנו לנוע. לאחר מכן נאחז את הגלגל הימני (המחובר למנוע C). הילדים יראו שעתה הרובוט פונה לכיוון ימין, כיוון הגלגל אותו אנו אוחזים ומונעים ממנו לנוע. נרשום את הכלל על הלוח: כאשר הרובוט מבצע פניה כיוון הפניה יהיה לצד בו המנוע הדומם (נרחיב כלל זה בהמשך כאשר נלמד לבצע פניה עם שני מנועים). נעבור עתה לתכנות וביצוע.
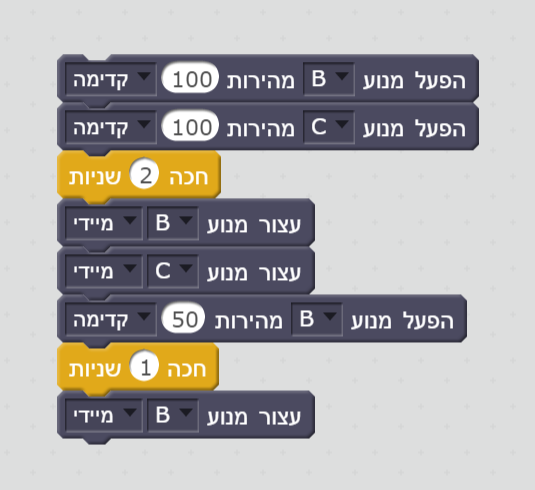
התוכנית שהילדים צריכים לכתוב היא:
מהירות המנוע יכולה להשתנות על פי בחירתם. כדאי להסביר שבסיבוב רצוי להשתמש במהירות נמוכה יותר