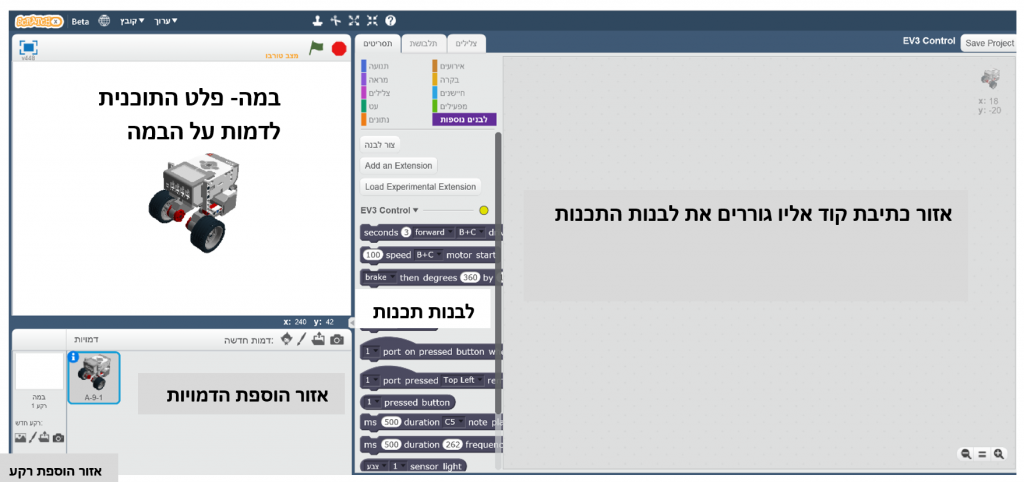
עתה ננסה לחבר את הרובוטים עם הילדים לתכנת ה- ScratchX. נתנסה עכשיו בתכנות ראשוני, בו נבקש מהם להניע את הרובוט קדימה.
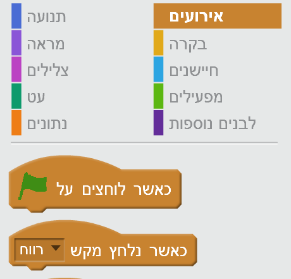
מומלץ להדגים לילדים איך גוררים פקודה לאזור התכנות ואיך מחברים פקודה לפקודה.
תרגיל
בתרגיל זה נאפשר לילדים להתנסות בתוכנה ללא הנחיה מקדימה וללמוד דרך החקירה)
הנחיה
רשמו תכנית שתגרום לרובוט לנוע קדימה.
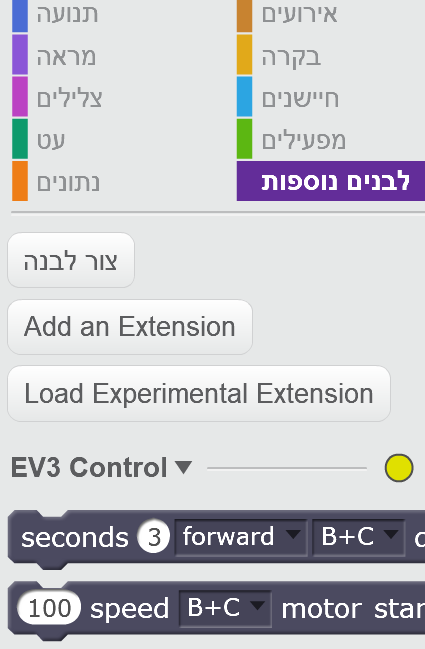
- פתחו את התוכנה וחברו אליה את הרובוט
- שמרו את התוכנית בשם Drive
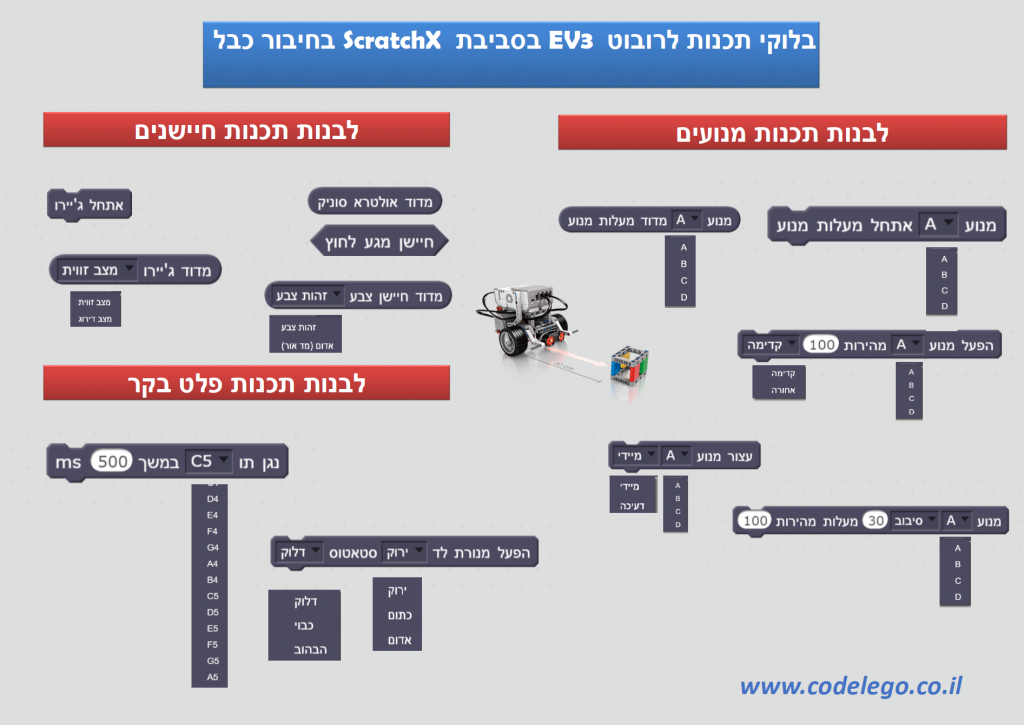
- גררו פקודות תכנות להנעת הרובוט קדימה לאורך שלוש מרצפות בכיתה.
- גררו פקודות תכנות לעצירת הרובוט.
למתקדמים
הוסיפו לתכנית:
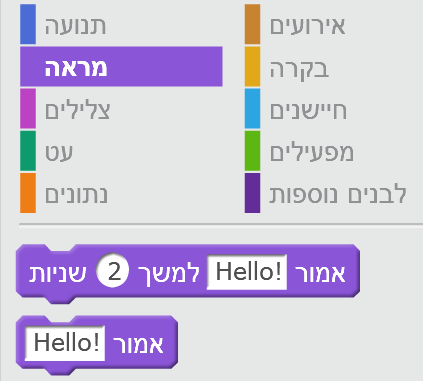
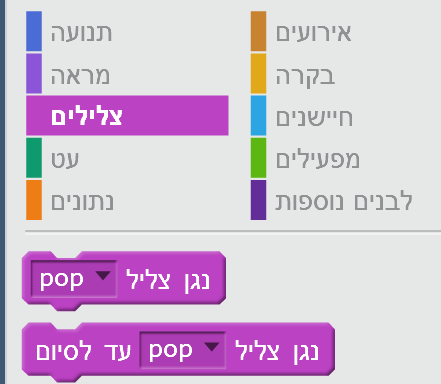
המתן שתי שניות, השמע צליל, הבהוב מנורות.
טיפים למתקשים
- זכרו שיש להניע שני מנועים B ו C באותה מהירות קדימה. בדקו שאכן המנועים שלכם מחוברים ליציאות אלה.
- אם הרובוט לא נוסע ישר בדקו שהצמיגים מחוברים כראוי ושאין מגע עם הכבלים.