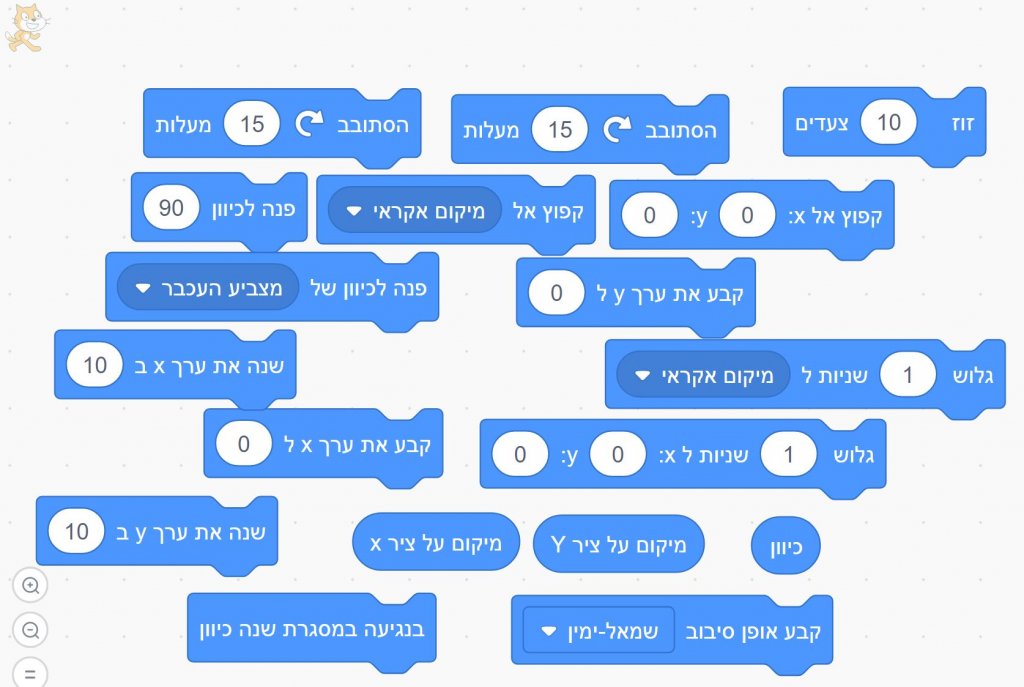
לבנות תנועה 
לבנות התנועה, הכחולות, מכילות פקודות תכנות הקשורות במיקום, בכיוון ובתנועת הדמות על הבמה.
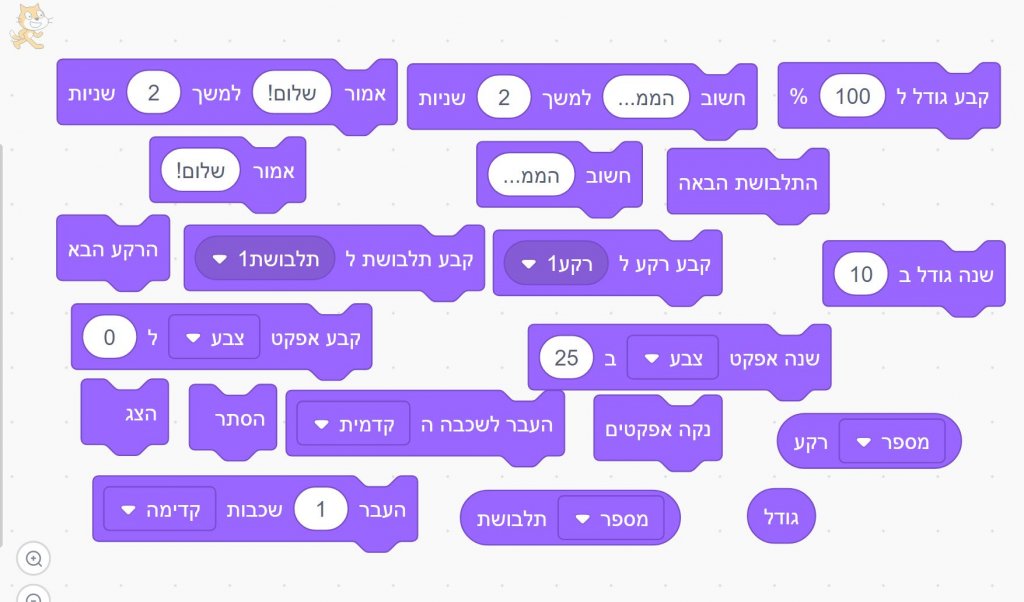
לבנות מראה 
לבנות המראה, הסגולות, מכילות פקודות תכנות הקשורות למראה, מלל, הנפשה, ורקע הדמות על הבמה.
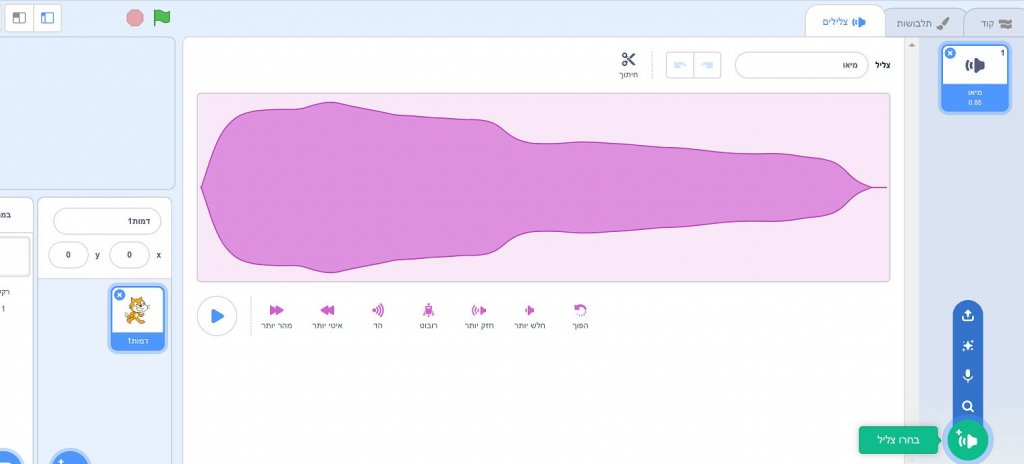
לבנות צלילים
לבנות הצלילים, הוורודות, מכילות פקודות תכנות הקשורות להפקת צליל ועריכתו בתסריט שלנו.

לבנות הארועים 
לבנות האירועים, הצהובות, מכילות פקודות תכנות הקובעות כיצד תתחיל הרצה של תוכנית או מספר תוכניות במקביל. בחיבור רובוט Bluetooth אין צורך בהן להתחיל תוכנית רובוט, אך אפשר לשלב מסרים. בתכנות בחיבור כבל USB עליכם להתחיל את תוכנית הרובוט באירוע.

לבנות בקרה
לבנות התכנות, הכתומות, מכילות פקודות תכנות המאפשרות לנו ליצור תנאים, חזרות ותזמון בתכנית שלנו.

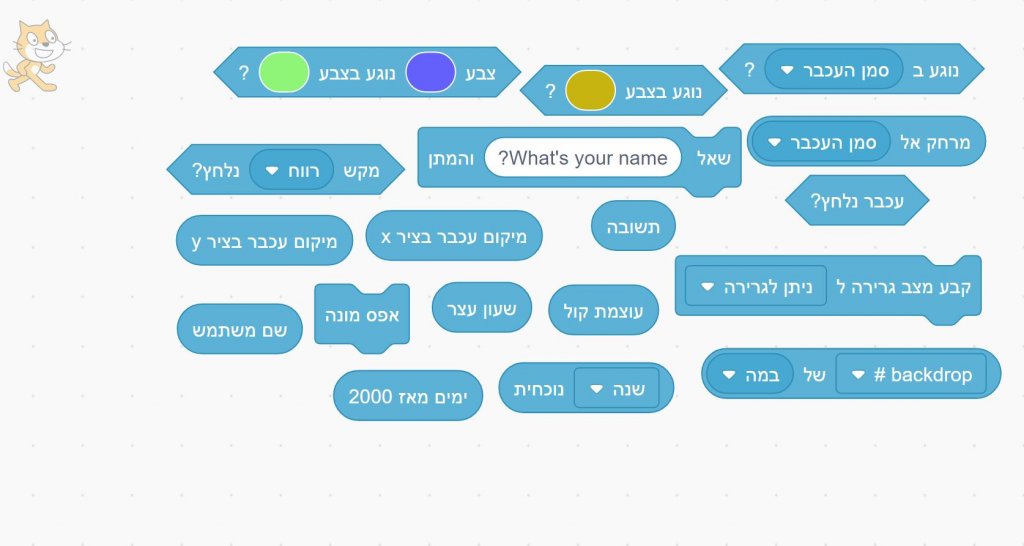
לבנות חיישנים
לבנות התכנות, התכולות, מכילות פקודות תכנות המאפשרות לדמות על במה לקיים קשר עם דמויות אחרות ועם הסביבה באמצעות בדיקת מצבים מוגדרים.
לבנות מפעילים
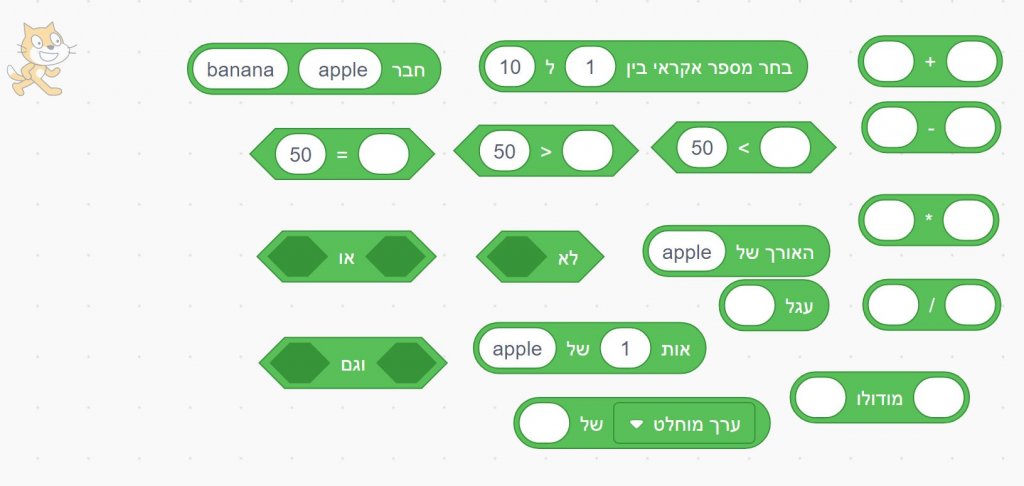
לבנות התכנות, הירקרקות, מכילות פקודות הפעלה חשבוניות והתניות לגורמים אחרים בתסריט- פקודות אלה תמיד מוכנסות למקום ייעודי בפקודות אחרות.
הפקודות האליפטיות- הן פקודות עם ערכים למשל "בחר מספר אקראי בין 1 ל10"
הפקודות המשושות – הן פקודות המציבות התניות.
לבנות משתנים
לבנות התכנות, הכתומות כהות, מכילות פקודות משתנים. המשתמש יכול ליצור פקודות משתנים ופקודות רשימות (אוסף משתנים). ברגע שניצור אותם תיווצרנה לבנות תכנות מתאימות.
המשתנה הוא סוג של מונה בהתאם למה שנבחר להגדיר.
נושא המשתנים נכלל בתכנית הלימודים, ברובוטיקה, בחלק ההרחבה.

הלבנים שלי 
הלבנים שלי, האדומות, מכילות פקודות ליצירת פונקציות שהן קבוצת פקודות לביצוע מטרה. לפונקציה אנו נותנים שם כך שנוכל לקרוא לה. השימוש בפונקציות מאפשר כתיבת קוד יעילה החוסכת כתיבת פקודות חוזרת.

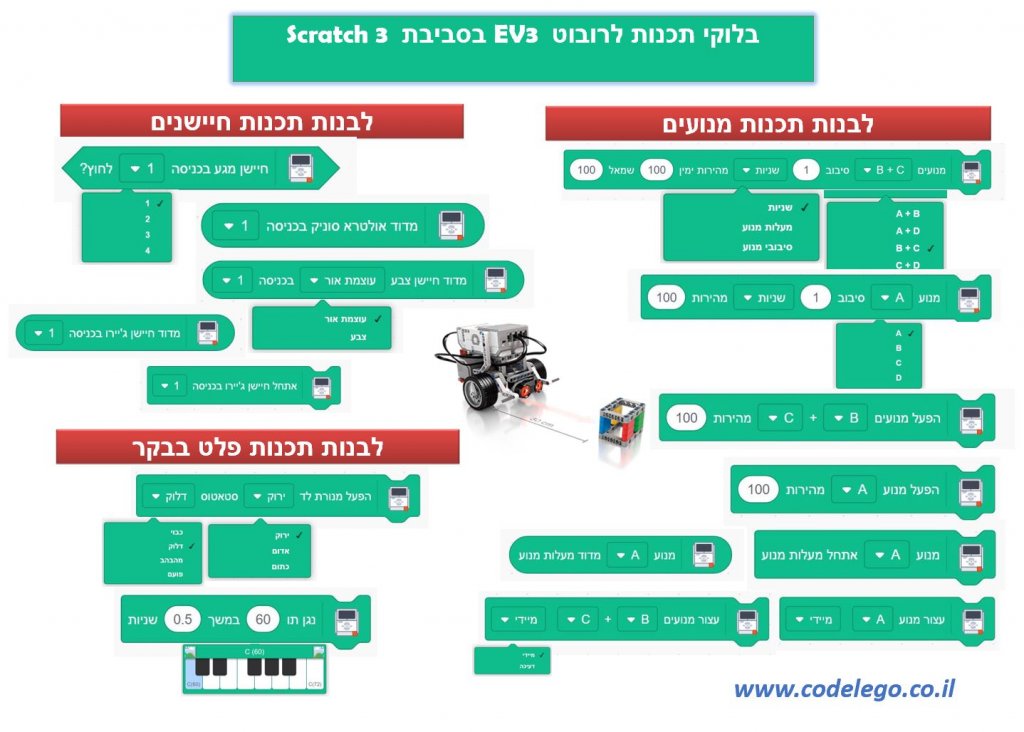
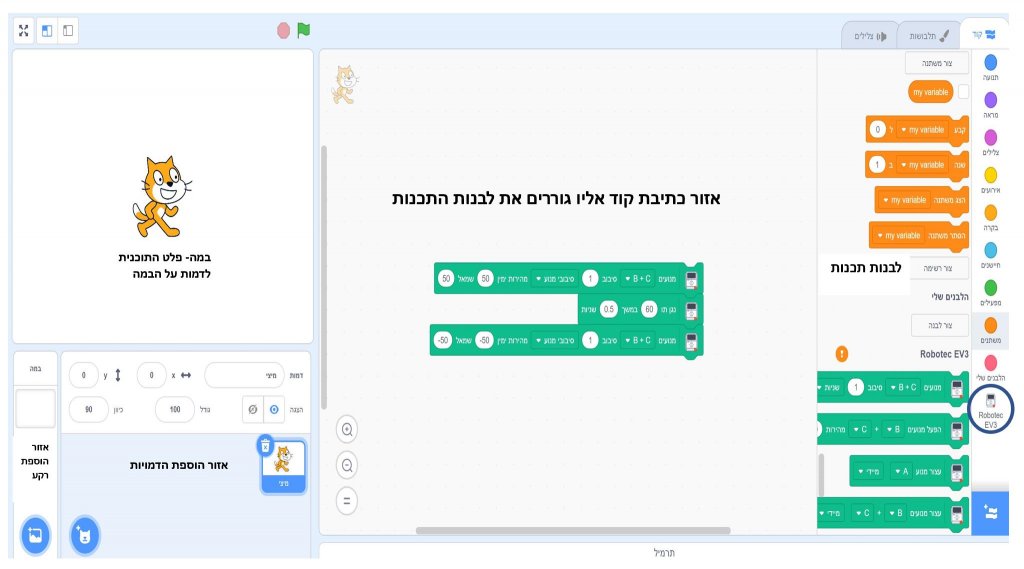
הרחבת רובוט EV3

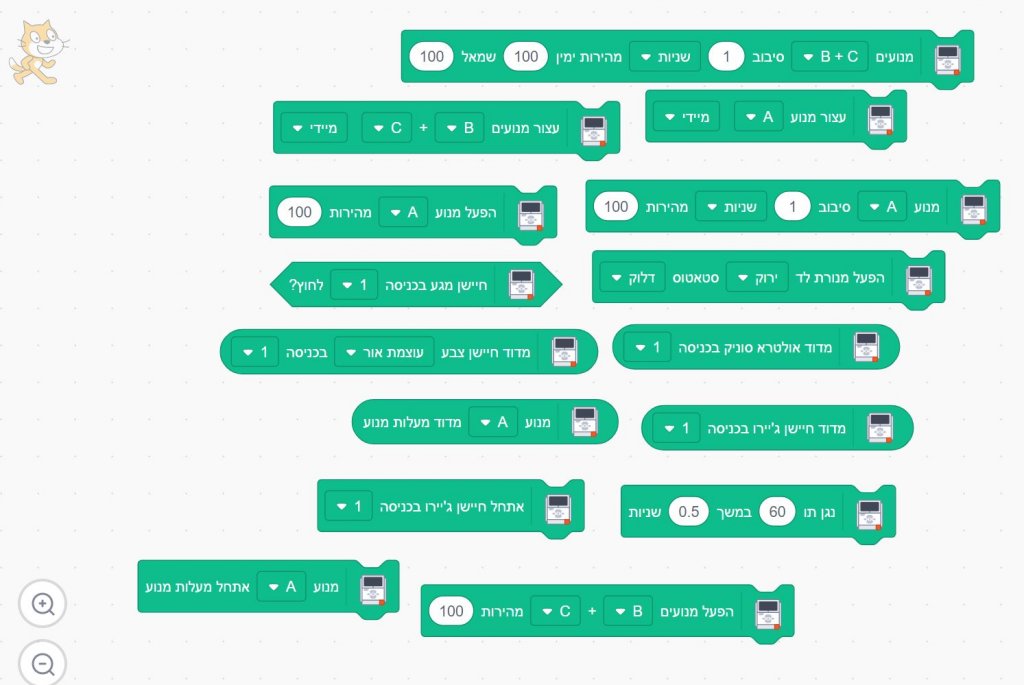
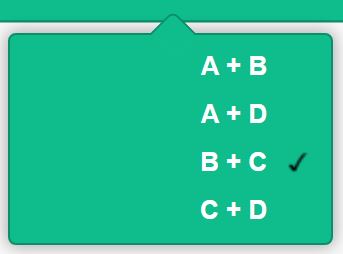
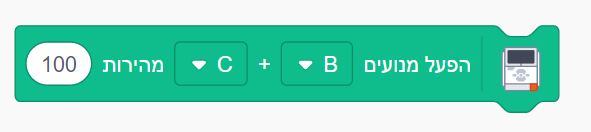
הגדרנו את כניסות מנועים B, C, כניסות ברירת המחדל. לשינוי יש ללחוץ על החץ.
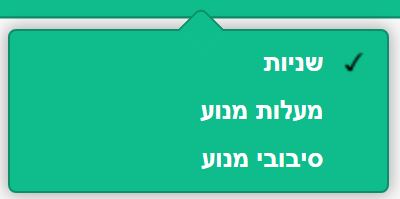
ביצוע נסיעת הרובוט יכולה להתבצע בזמן מסוים – בחירה בשניות
ביצוע נסיעת הרובוט יכולה להתבצע על ידי בחירה במדידת מעלות סיבוב המנוע
ביצוע נסיעת הרובוט יכולה להתבצע על ידי מדידת מספר הסיבובים (360 מעלות) שמבצע המנוע

שימו לב 360 מעלות = 1 סיבוב מנוע.

פקודה שימושית מאוד להנעת זרועות. ברירת המחדל למנועי זרועת הן כניסות A, D. לשינוי כניסת המנוע בחרו בחץ.
מומלץ להניע את הזרוע על פי מעלות סיבוב מנוע או על זמן.


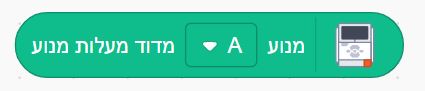
איתחול מעלות מנוע היא פקודה בה נשתמש לפני פקודת מדוד מעלות מנוע.![]()
הפקודה גורמת לחיישן המדידה במנועים לאפס את עצמו ולאפשר למדוד מעלות מנוע מהתחלה.
אנו יכולים להשתמש בפקודה כדי לגרום לרובוט לנסוע מרחק מוגדר ומדויק, לדייק במידת ההרמה של זרועות ועוד.

פקודת מדוד מעלות מנוע, היא בצורה אליפטית. אנו משתמשים בפקודה זאת בתוך מפעיל לקבלת ערך מספרי ושמים אותה בתוך התניה. הרובוט יכול לנסוע ישר עד שמדידת מעלות המנוע תהיה כמבוקש.

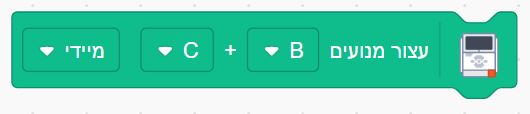
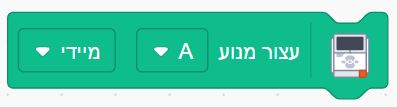
עצירת שני מנועי הרובוט בו זמנית.
אפשר לעצור את הרובוט מיידית- הרובוט מתוכנת כך שהוא יעצור במקום.
אפשר לעצור את הרובוט בדעיכה, הרובוט יעצור תוך כדי האטה.
לבנת הפעלת חיישן מגע שצורתה משושה היא הוראת תנאי לבדיקה אותה מכניסים, במקום המיועד לכך, בלבנה אחרת.
לדוגמה:
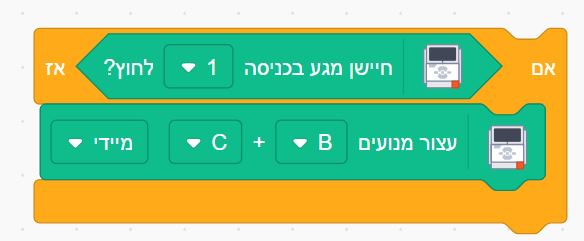
עלינו לבחור את כניסת החיישן המתאימה אליה חיברנו את החיישן. לשינוי כניסה לחצו על החץ.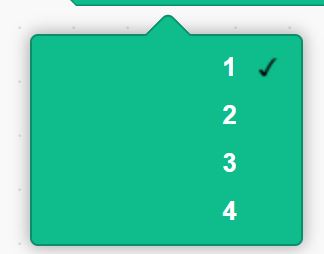
אפשר לחבר לרובוט יותר מחיישן מגע אחד ולתכנת כל אחד מהם באמצעות הגדרת החיבור בכניסה לרובוט. יש להשתמש בשתי פקודות כאלה כמובן.

לבנת חיישן האולטראסוניק, האליפטית, היא פקודה המקבלת ערך מספרי לבדיקה באמצעות פקודת מפעיל ומוכנסת כתנאי לבדיקה בלבנת תכנות תנאי.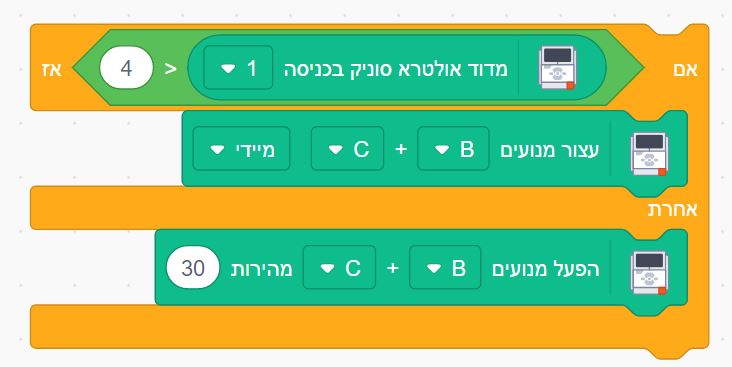
לבנת חיישן הצבע האליפטית, היא פקודה המקבלת ערך מספרי לבדיקה באמצעות מפעיל ומוכנסת כתנאי לבדיקה בלבנת תנאי.
לחיישן הצבע יש שתי אפשרויות בדיקה:

אפשרות ראשונה- "עוצמת אור" בודקת החזר אור ממשטח, ערכי הבדיקה הם בין 0-100 אחוזים.
אפשרות שניה- "צבע" בודקת זהות צבע מבין שבעה צבעים מוגדרים מראש לחיישן.


לפני כל מדידה עם פקודת "מדוד חיישן ג'יירו"
![]()
הקפידו לאתחל את החיישן כך שיהיה מאופס ולא יכיל זיכרון מדידות קודמות.
לבנת נגן תו מאפשרת להפיק צליל פלט בבקר הרובוט. לחיצה על מספר מזהה לתו פותח תפריט קלידים לבחירת צלילים נוספים.
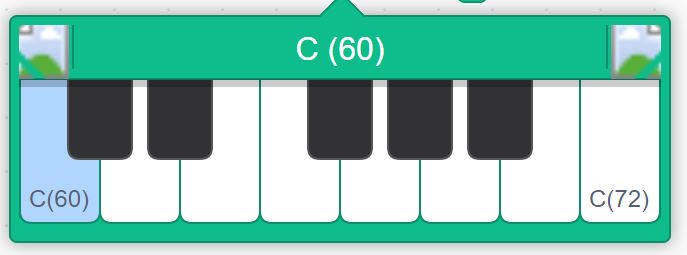
בחירה בצלמיות התמונה מעל הקלידים (מימין ומשמאל) מאפשרת ניווט בסולם הצלילים.
משך השמעת הצליל מאפשרת שליטה במקצב הצלילים.

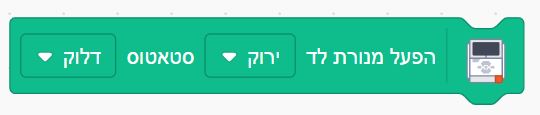
לבנת הפעל מנורת לד, מאפשרת הדלקת נורית בבקר הרובוט.
לחיצה על חץ הצבע מאפשרת בחירה בין שלושה צבעים (ירוק, אדום וכתום)

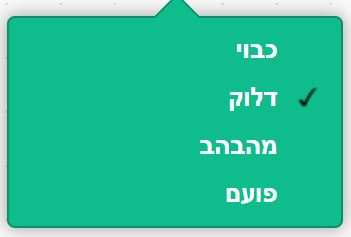
לחיצה על סטטוס מצב הנורה מאפשר בחירה בין ארבעה מצבים (כבוי, דלוק, מהבהב ופועם)