נושאים:
מעקב אחר קו בדרך של זהות צבע
תנאים ולולאות
הקדמה למורה-
שיעור זה עוסק במעקב פשוט אחר קו בדרך של זהות צבע. לאחר שהילדים למדו לזהות צבעים שונים במשטח ולתכנת אותם בעזרת החיישן, תנאים ולולאות, אנו רוצים ללמדם מעקב אחר קו. מעקב אחרר קו בדרך של זהות צבע מאפשרת לעבור לנושא מבלי להכנס עדין למדידת החזרי אור ממשטח. הילדים יודעים לעבוד עם החיישן וצריכים לפתור את בעיית מעקב אחר קו עם חיישן צבע אחד.
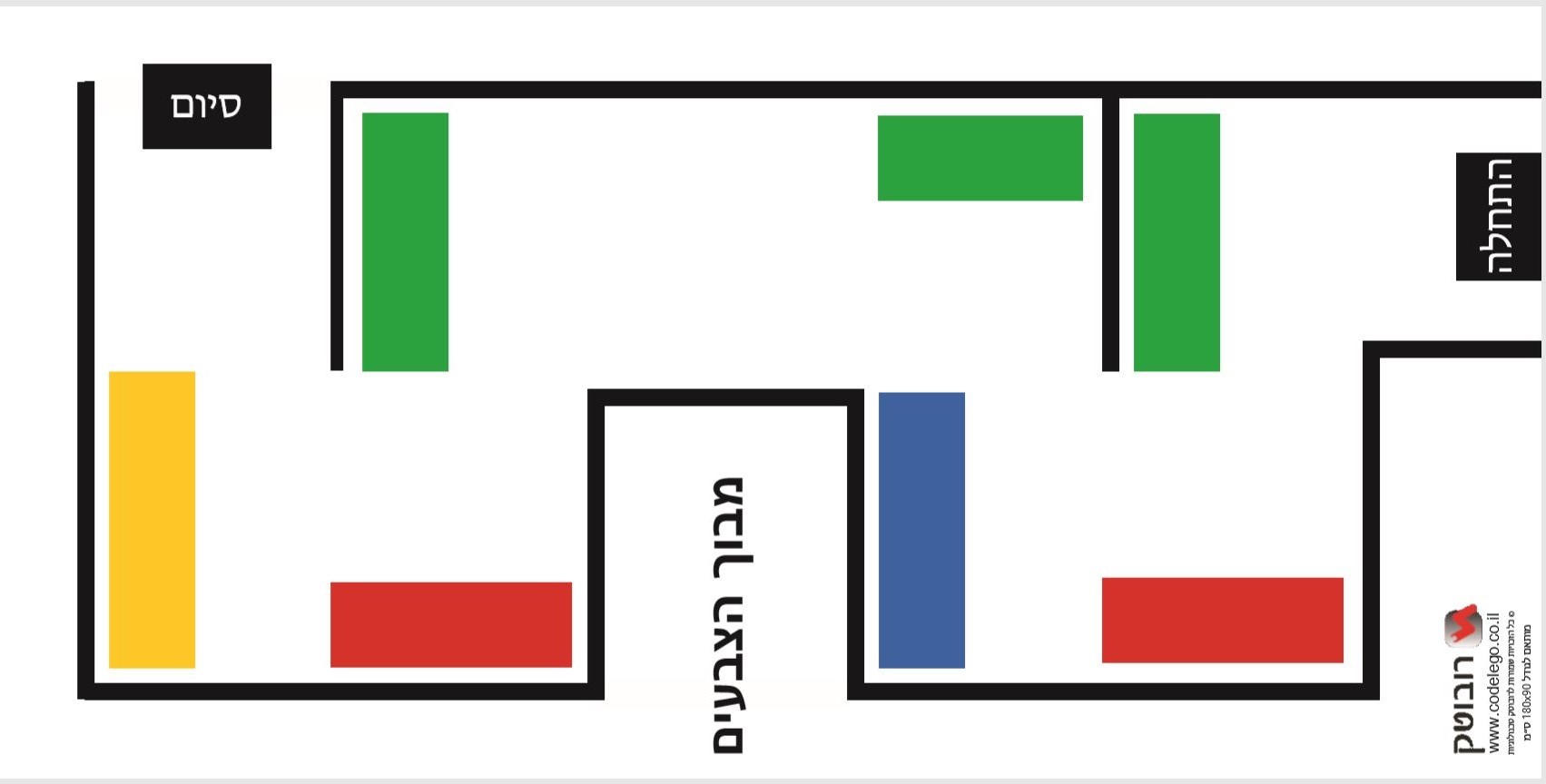
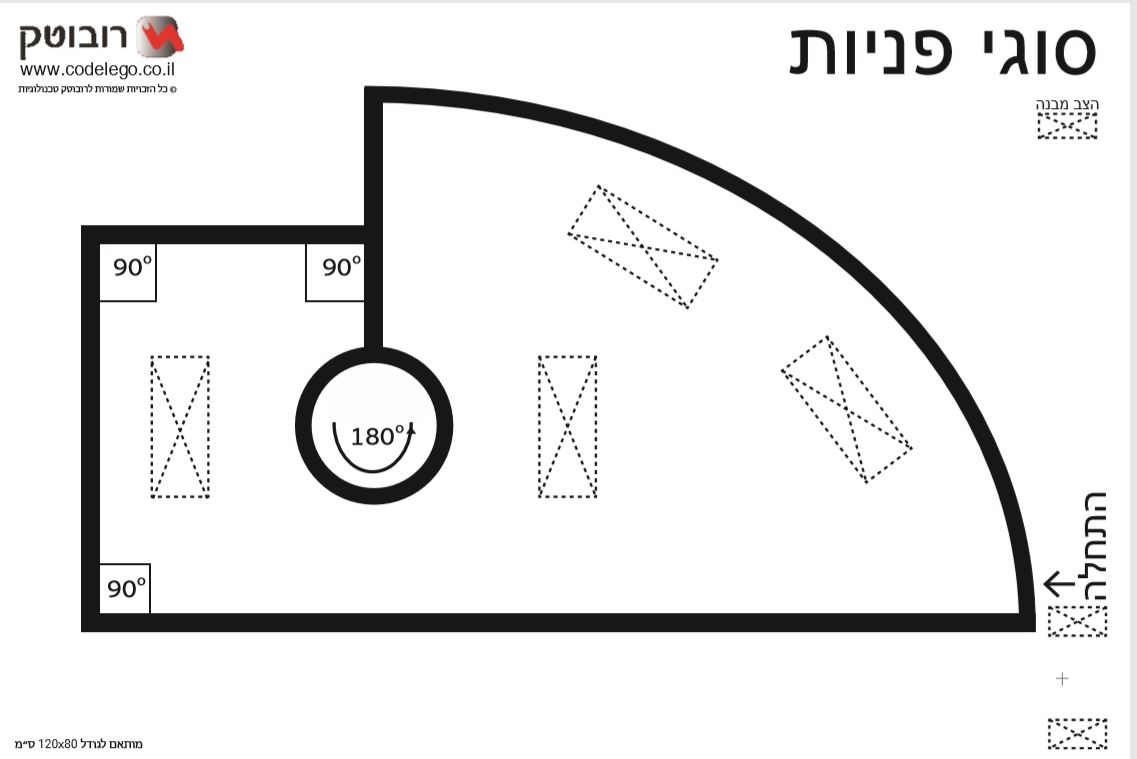
ציוד נדרש נוסף: שטיח מבוך הצבעים/שטיח סוגי פניות או איזולירבנד ובריסטול לבן.

משימה ראשונה
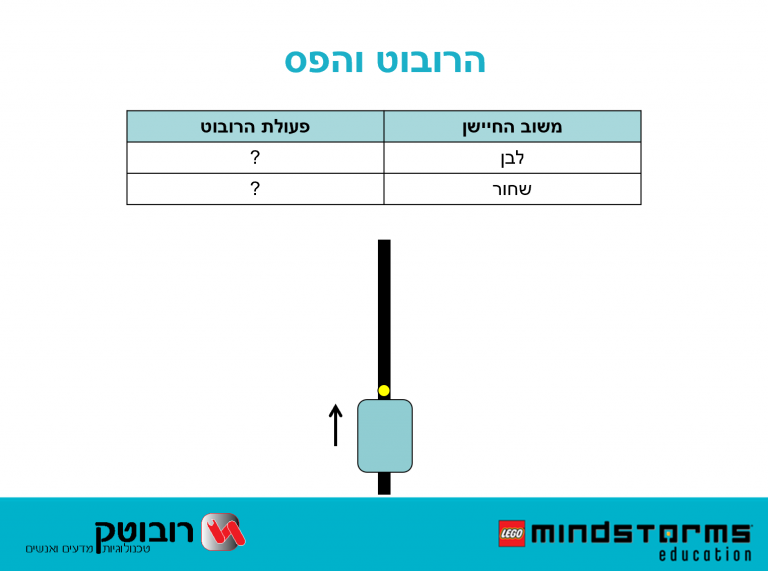
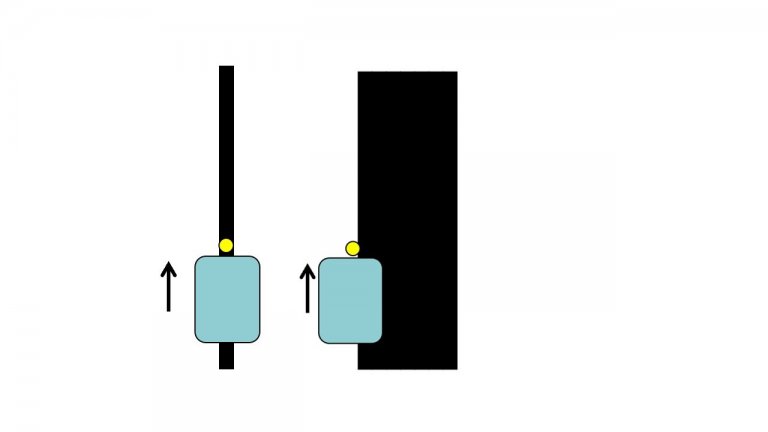
כתבו תוכנית שעוקבת אחרי קו שחור
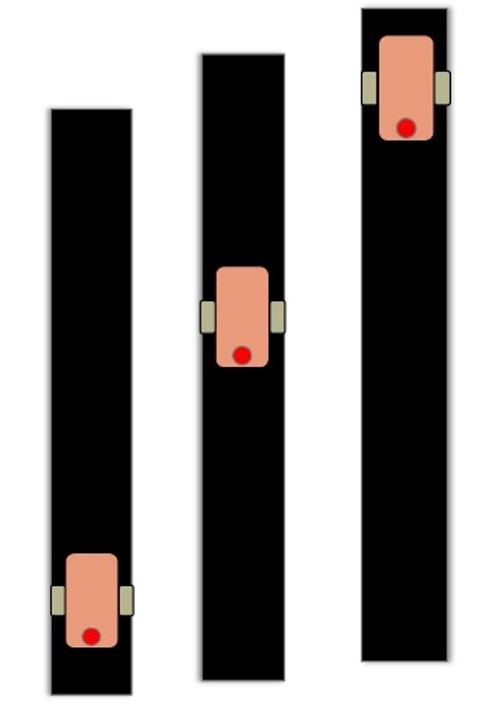
- החליטו אחרי איזה שול של הקו תעקבו (שמאלי או ימני)
- כתבו את האלגוריתם.
- תכנתו את תוכנית הרובוט.
לעזרתכם מצורפת שוב טבלת הצבעים

