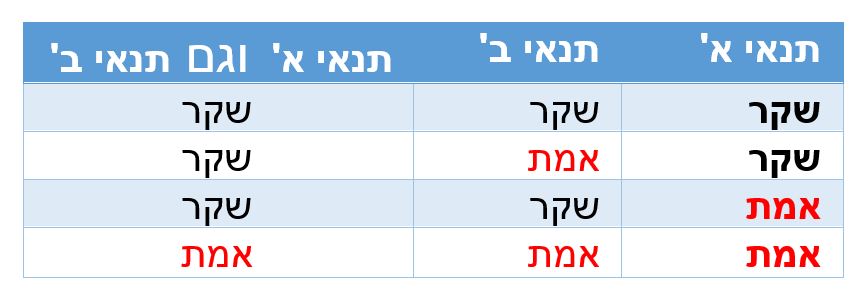
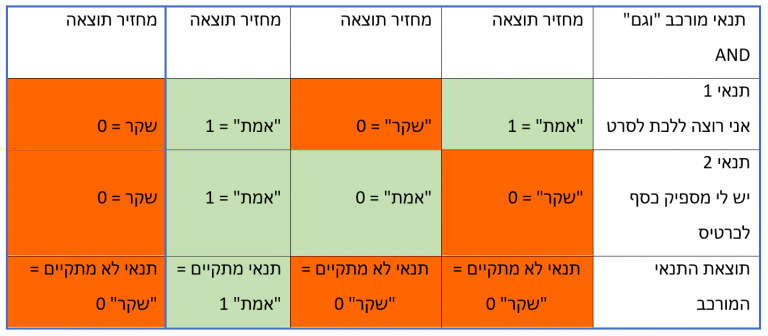
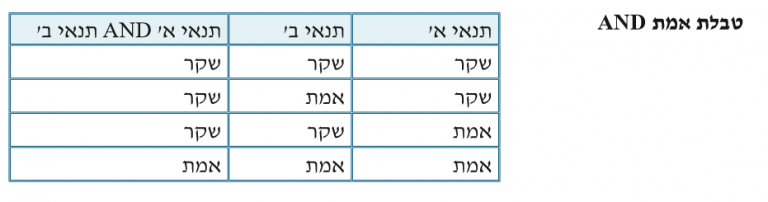
על מנת שהפקודות לאחר התנאי (עצירת המנוע) יתבצעו, שני התנאים חייבים להחזיר תוצאת "אמת", כלומר גם לחיצה על חיישן המגע וגם חיישן המרחק מקבל ערך קטן מ-4.
אם רק אחד מהתנאים יתקיים התוצאה שתוחזר תהיה "שקר" והפקודות לאחר מכן לא תתבצענה.
רק לחיצה על חיישן מגע לא תענה על התנאי
רק זיהוי מרחק קטן מ-4 ס"מ על ידי חיישן מרחק לא יענה על התנאי.
הערך שיחזור מהבדיקה, במקרה זה, יהיה "שקר" = 0
אם שניהם מתקיימים, כלומר חיישן מגע נלחץ והמרחק מהאובייקט קטן מ-4 ס"מ, יוחזר ערך "אמת" = 1. התוכנית תמשיך לפקודות הבאות.
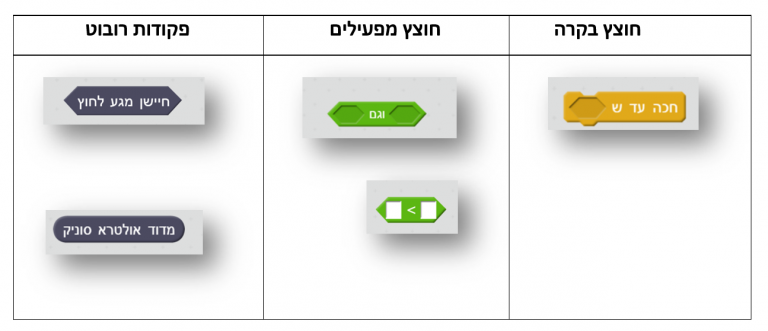
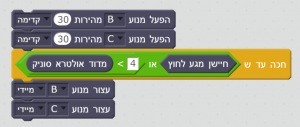
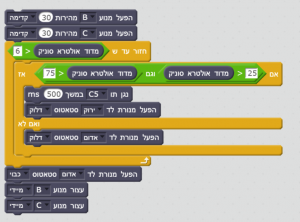
אז כיצד נתכנת את פקודת התנאי המורכב "וגם"?