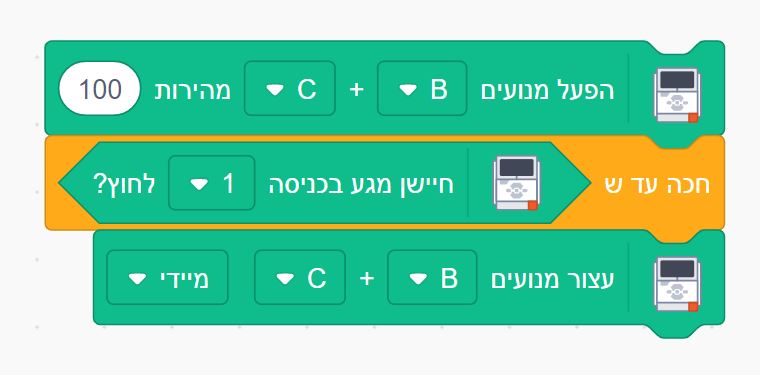
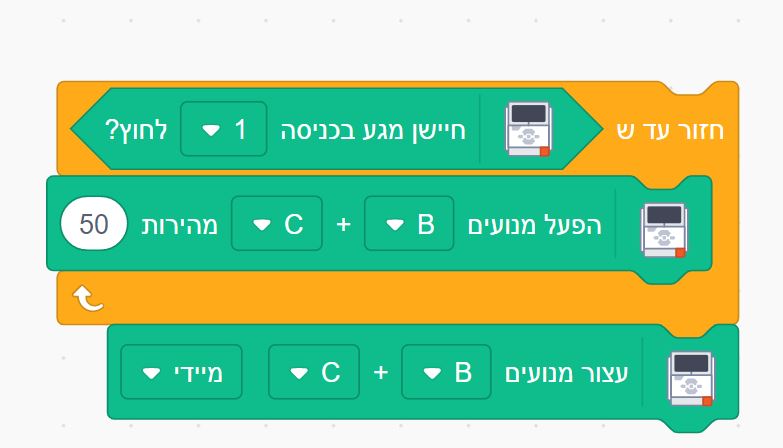
כדי להקל על הילדים בתכנות, נוצרה לבנת תכנות "חיישן מגע לחוץ" כך שהילדים לא צריכים ליצור משוואה בעזרת המפעילים. ברגע שהם בוחרים בלבנת התכנות הזו, ברירת המחדל היא שחיישן המגע לחוץ. בלוק התכנות הזה ישמש אותנו בצירוף עם בלוקים נוספים של תנאים ולולאות.
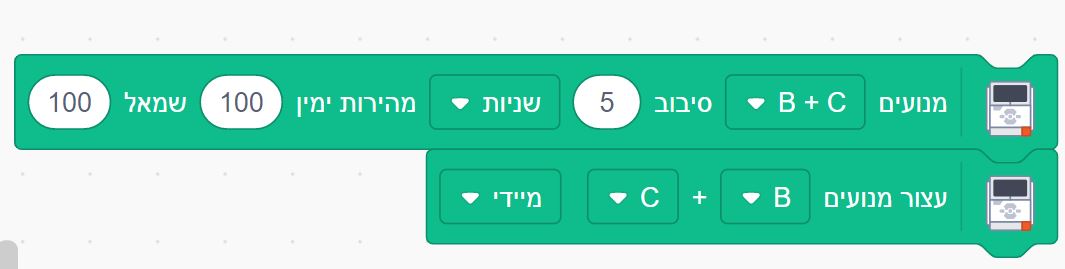
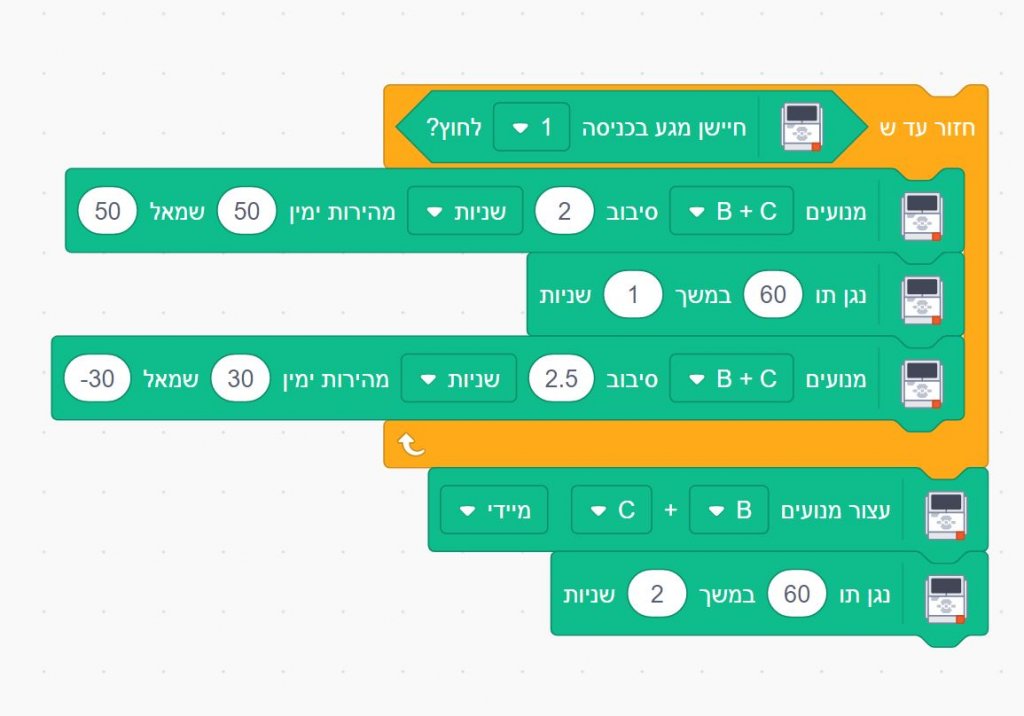
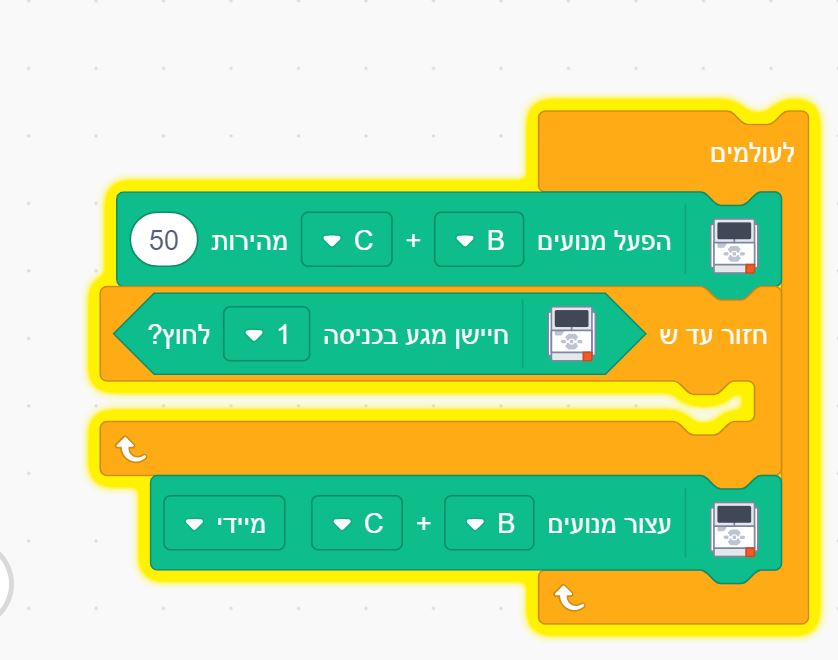
עתה הרובוט החכם שלנו מוכן לנוע בסביבה עם מערכת בקרה בחוג סגור. הרובוט יקלוט מידע מהסביבה, אם חיישן המגע נלחץ או לא ויפעל בהתאם לקלט המתקבל. כדי לקבוע את סוג התגובה בהתאם לקלט עלינו להשתמש בתנאים.
אם התשובה שהוחזרה היא חיישן לחוץ מה תהיה תגובת (פעולת) הרובוט?
אם התשובה שהוחזרה היא חיישן משוחרר מה תהיה תגובת (פעולת) הרובוט?
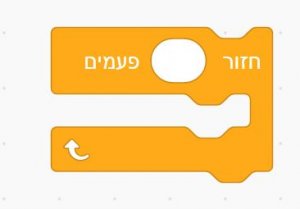
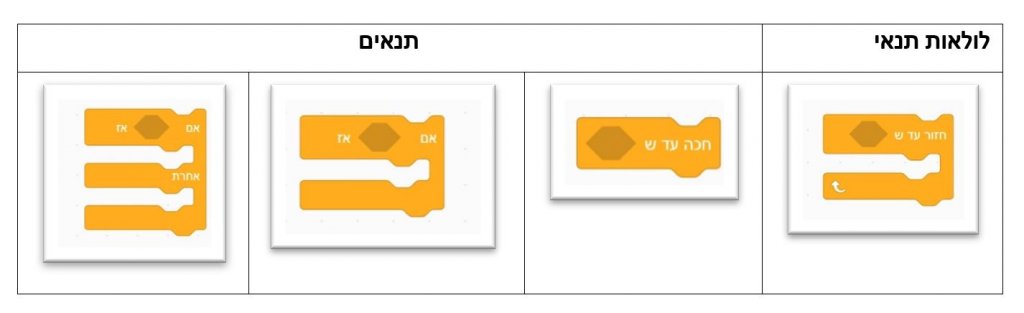
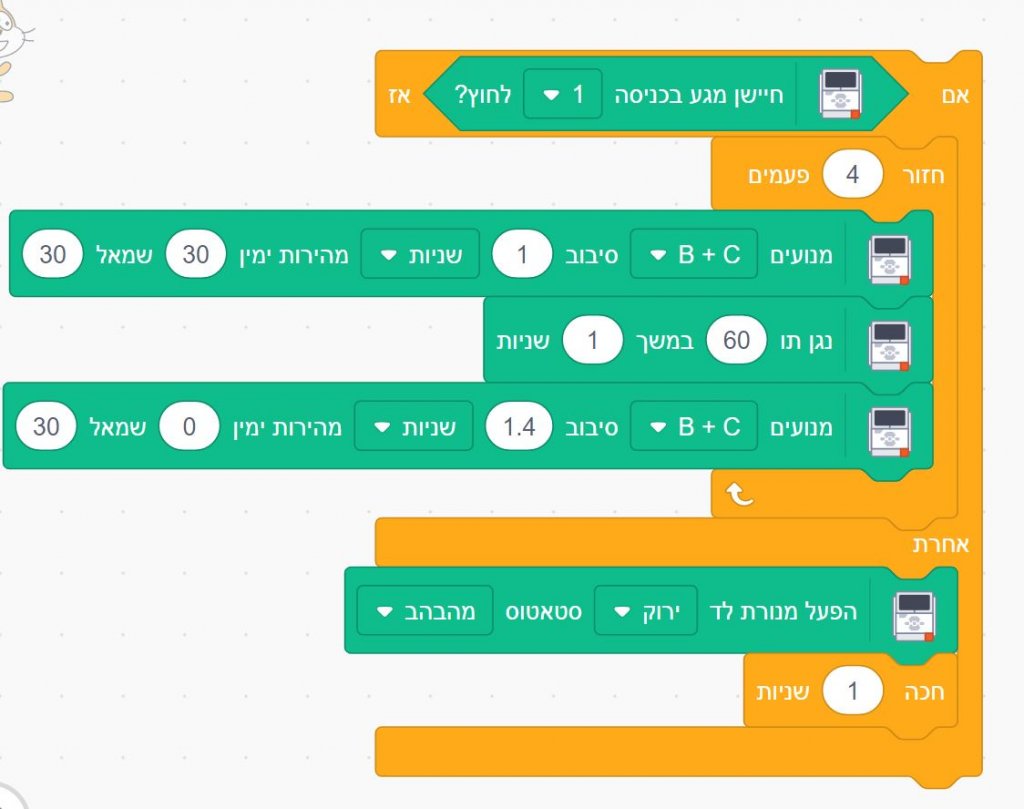
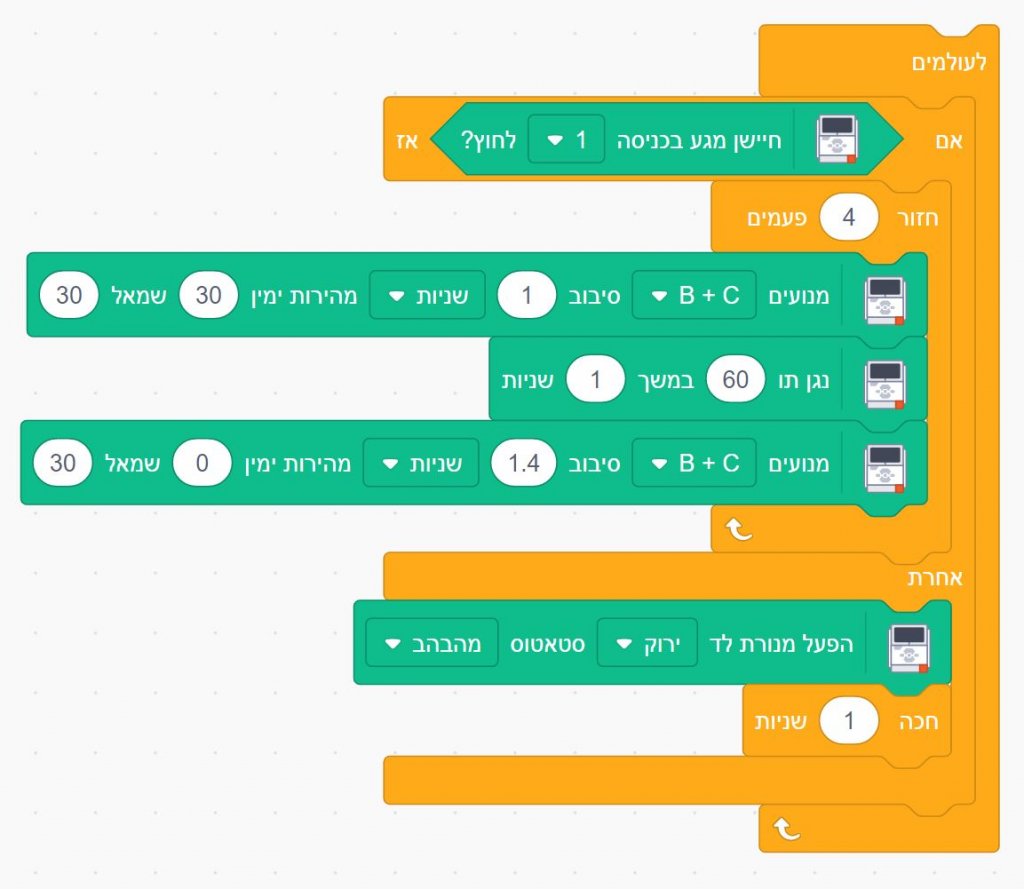
התנאים בתוכנית יעזרו לנו לשלוט על מהלך התכנית. הם מאפשרים לנו לומר לתכנית להפעיל, או לא להפעיל פקודות מסוימות בהתאם לתנאים שהגדרנו. נוכל לגרום לתכנית "לקבל החלטות" במהלך הרצתה. בתכנות חיישן המגע, נשתמש בתנאי בוליאני, תנאי שתוצאתו יכולה להיות אמת (true) או שקר (false). כאשר התנאי מתקיים = אמת, תופעל פקודת התכנות הבאה אחריו. כאשר התנאי אינו מתקיים = שקר, התכנית לא תבצע את הפקודות הכתובות לאחר התנאי ותמשיך לפעול כפי שפעלה עד עתה.
בואו נזכר מה זה תנאי? תנו דוגמאות לתנאים.
דוגמאות:
- אם הגעת לצומת דרכים, פנה שמאלה
- אם תסיים את המטלות שלך תוכל להיפגש עם חברים
- אם תדליק את מתג הנורה יידלק אור בחדר
- אם ירד גשם ההפסקה תתקיים במבואת בית הספר
- אם אקליד סיסמא נכונה בחשבון המחשב שלי אוכל להיכנס לחשבון שלי
נשאל- מה חשיבות התנאי בעבודה עם תכנית מחשב?
תנאי בתכנית מחשב, מאפשר לנו ליצור בקרה (שליטה) על רצף התכנית.
אם תנאי מסוים יתקיים, התכנית תמשיך ממקום מסוים ואם לא יתקיים, פעולה אחרת בתכנית תפעל.