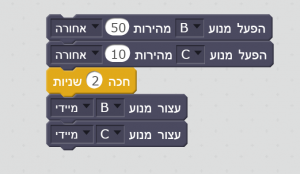
נשאל אותם מה הפלט שיבצע הרובוט.
נחלק לילדים עתה את דף העבודה לתלמיד ונבקש מהם את הפעילות הראשונה והשניה.
הדף מכיל כמה פעילויות שתבוצענה לכל אורך תהליך ההוראה.
פתרון פעילות מספר 1
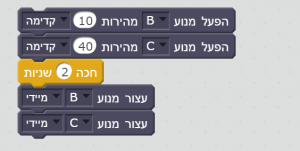
רונית כתבה את התכנית הנכונה לביצוע פלט התואם את האלגוריתם. יואב טעה, הפלט שהרובוט שלו יבצע יהיה נסיעה ישר קדימה למשך חמש שניות ועצירה למשך 3 שניות, אך לאחר מכן יפנה לצד שמאל.
פתרון פעילות מספר 2
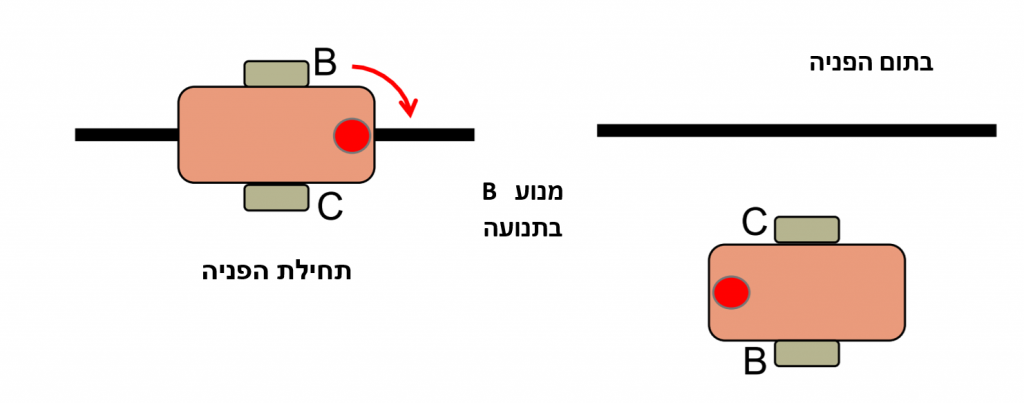
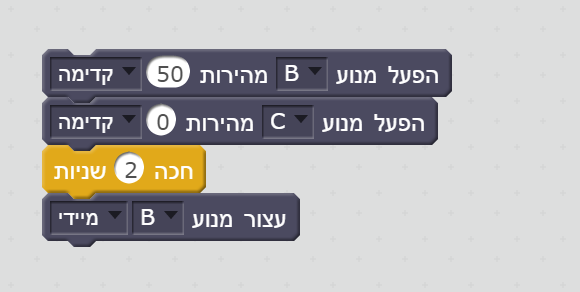
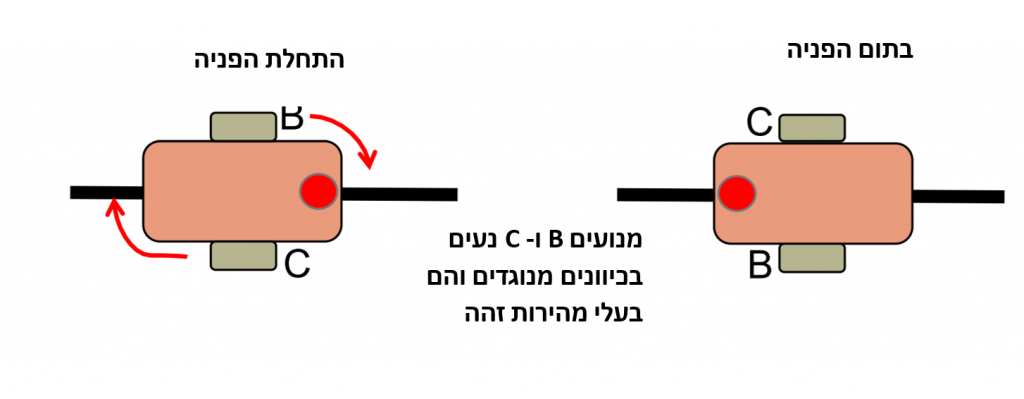
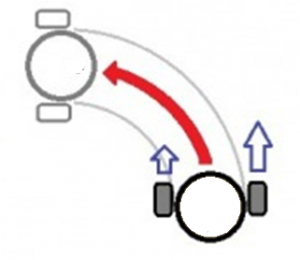
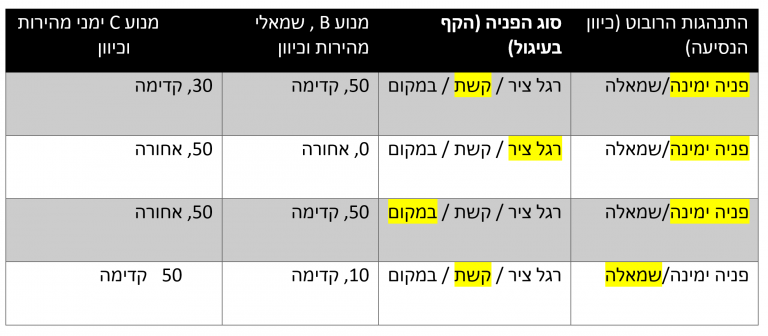
כאשר אחד המנועים מקבל ערך מספרי ואילו השני 0, הרובוט יסתובב בכיוון המנוע שערכו אפס.