סוגי בקרות- חוג פתוח (אוטומטי) חוג סגור (מערכת מגיבה לסביבה)
עד עתה עבדתם עם הרובוט כאשר הוא נע במרחב ללא חיישנים ובעצם ללא שום אפשרות לשינוי התנהגותו בהתאם למה שנמצא בסביבתו.
לדרך בה רובוט או מכונה עובדים בצורה אוטומטית בסביבה, ללא תגובה לשינויים, אנו קוראים: בקרה בחוג פתוח
בקרה בחוג פתוח היא בקרת מערכת טכנולוגית המתקיימת באופן אוטומטי, ללא קליטת תנאי הסביבה וללא יכולת תגובה לשינויים בה.
אחד הדברים החשובים, לאדם, בפיתוח מערכת טכנולוגית, הוא שהמערכת תפעל, כמה שיותר, ללא מגע יד האדם ותקל עליו בשגרת יומו. כדי שלמערכת טכנולוגית תהיה בקרה (שליטה) על פעולתה, לא חייבים להשתמש בחיישנים. מערכות רבות מבוקרות ללא חיישנים. לדוגמה מערכות השקיה אוטומטיות, מפעילות ברזי השקיה על פי זמנים שקבע הגנן. הברזים מופעלים בימים מסוימים, בשעות קבועות ולאורך זמן פעולה קבוע.
בקרה בחוג פתוח עובדת היטב כל עוד המערכת תקינה וכל עוד אין שינויים בתנאי הסביבה. שינויים בתנאי הסביבה, למשל חמסין קיצוני, מצריך שינוי בתנאי ההשקיה.
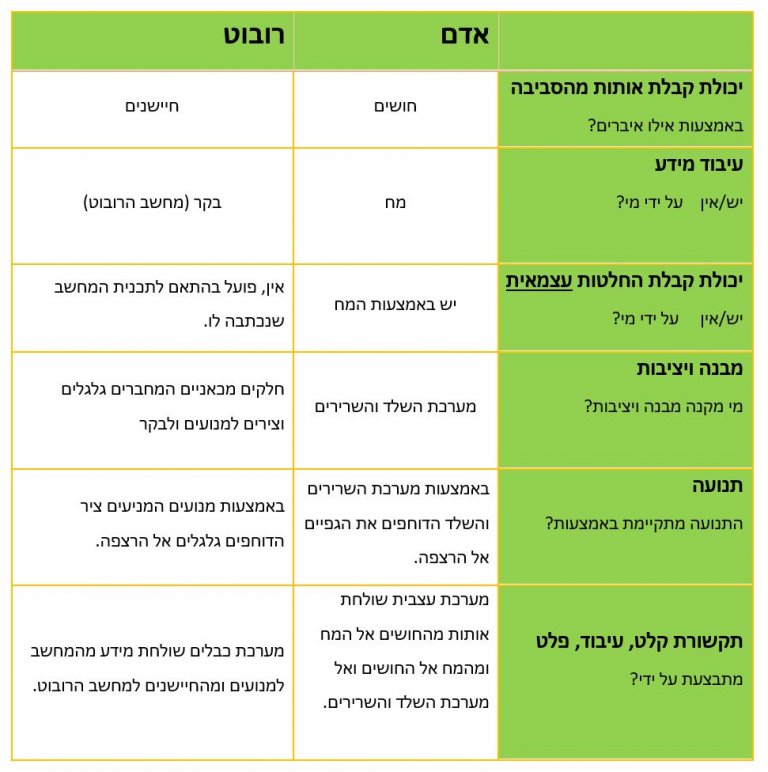
רובוט הפועל במערכת בקרה בחוג פתוח, נע בסביבה מבלי להשתמש בחיישנים הקולטים מידע ממנה ובעצם מבלי לקבל משוב המאפשר לו לבצע פלט תואם שיאפשר לו להתאים את עצמו אליה.
בלי חיישנים הרובוט לא יכול ל"תקשר" עם הסביבה, לגלות לאן לנסוע, איך להתנהג בזמן שהוא נתקע בעצם, ההתנהגות שלו לא תהיה עצמאית (אוטונומית), הוא לא יוכל לקבל החלטות ולפעול על פי התנאים בשטח.
לעומת זאת רובוט המתנהל בסביבתו עם חיישנים פועל כמערכת בקרה בחוג סגור.
מערכות בקרה בחוג סגור – מערכות טכנולוגיות, המבוקרות על ידי חיישנים ומגיבות בשינוי התנהגות בהתאם לשינויים בסביבה.
רובוט כזה מגלה יעילות גדולה יותר עקב היכולת להגיב לשינויים בתנאי הסביבה. רובוט זה ישתמש בחיישנים כדי לקלוט מידע מהסביבה ובהתאם למדידת החיישנים יתאים את תגובתו לשינוי בסביבה.