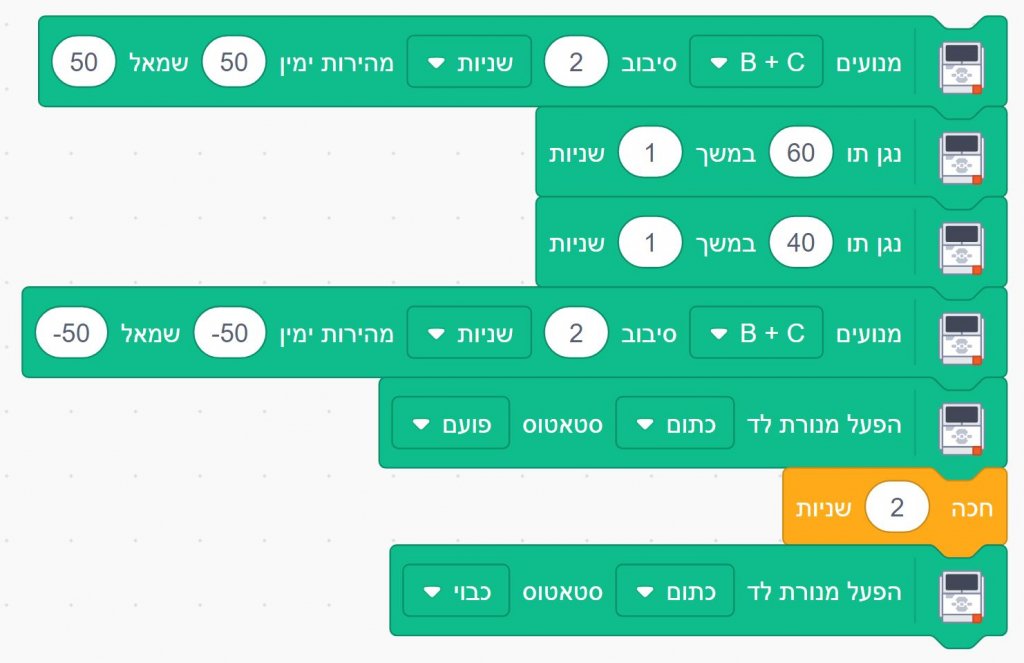
בפקודת "הפעל שני מנועים " נבדוק שאכן המנועים שלנו מחוברים בכניסות ברירת המחדל
(B מנוע שמאל, C מנוע ימין)
נחליט על דרך מדידת סיבובי המנוע (זמן- שניות, מעלות מנוע או סיבובי מנוע). סיבובי המנועים נמדדים לאורך זמן (שניות)
סיבובי המנועים נמדדים לאורך זמן (שניות) סיבובי המנועים נמדדים במעלות סיבוב
סיבובי המנועים נמדדים במעלות סיבוב סיבובי המנועים נמדדים במספר סיבובים מלאים (סיבוב = 360 מעלות)
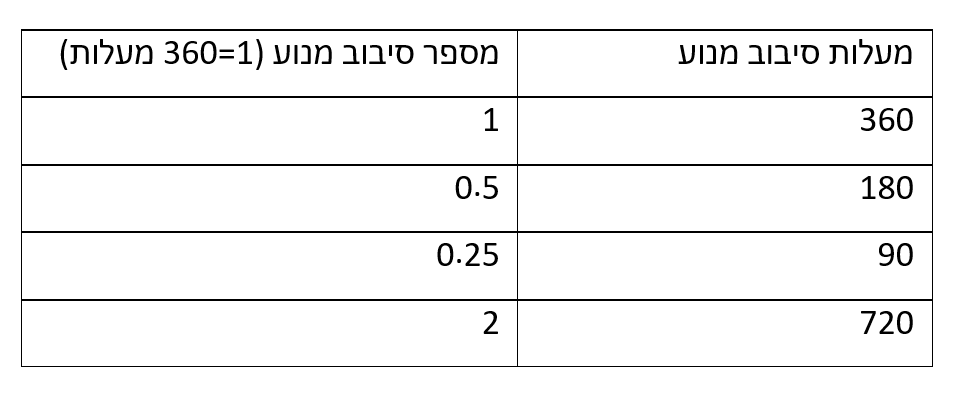
סיבובי המנועים נמדדים במספר סיבובים מלאים (סיבוב = 360 מעלות)
כדאי להסביר לילדים שהמהירות נקבעת באחוזים מיכולת מהירות הרובוט.
0 אחוזים = אין תנועה כלל ועד 100 אחוזים = סיבוב המנוע הכי מהיר.
שימוש בערכים גבוהים צורכים יותר סוללה.
מומלץ לדון גם בקשר בין מהירות לדיוק. ככל שננוע מהר יותר יכולת הדיוק של הרובוט קטנה.