נושאים:
מערכת מחשב-רובוט
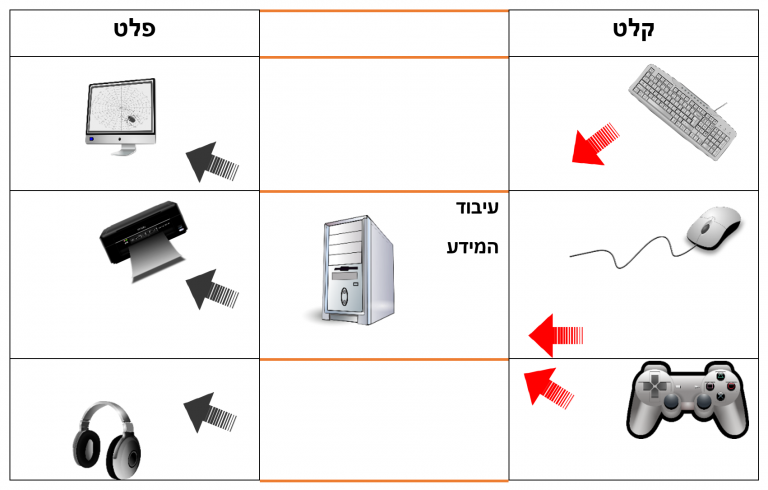
קלט, פלט, מעבד
סוגי מערכות מחשב ושימוש במחשבים
הקדמה למורה:
שיעור זה הוא השיעור הראשון בו המורה מכניס את הילדים לעולם התוכן בדרך חווייתית ומזמינה.
בשיעור זה רצוי לשלב סרטונים על רובוטים מתחומים מגוונים כגון עולם הרפואה, החקלאות וכדומה. מאגר סרטונים תוכלו למצוא במאגר הקישורים שלנו.
בסוף מפרט השיעור, בהרחבה, צירפנו הרצאה שניתנה במסגרת "אקדמיה ברשת" בה יש דוגמאות רבות לרובוטים מתחומים מגוונים.
הרובוט מבוסס על שימוש במערכת ממוחשבת, לכן נכיר לילדים מעט מושגים מעולם המחשב.
בתום יחידת שיעור הפתיחה, נקדיש כשני מפגשים לבניית הרובוט הבסיסי איתו נעבוד במחצית זו.